“Колеса Илона” (всенаправленного движения) позволяют обеспечить проходимость по любым поверхностям и возможность маневрирования какой угодно сложности.
Манипулятор позволит взаимодействие с разными объектами. А камера и Raspberry Pi 4B 4GB даст неограниченное поле для возможностей применения благодаря нейронным сетям.
Управление системой производится с помощью Raspberry Pi 4B 4GB - микрокомпьютеру, чьи возможности ограничиваются лишь вашим воображением. Основной язык программирования - Python, один из самых передовых языков программирования на сегодняшний день.
Возможности набора:
- Объектно-ориентированный подход в программировании;
- Качественное исполнение деталей для сборки;
- Возможность программировать с компьютера, ноутбука, телефона;
- Возможность углубленно изучать машинное зрение и машинное обучение;
- Колёса всенаправленного движения позволяют обеспечить проходимость по неровным поверхностям и возможность маневрирования;
- Манипулятор позволяет взаимодействовать с разными объектами
- Возможно программирование на Python, JavaScript, JQuery, Java, C, C ++, Perl и Erlang;
- Движение по линии;
- Распознавание объектов;
- Распознавание цветов;
- Сопоставление цветов;
- Можно управлять дистанционно, используя свой гаджет (смартфон, планшет).
Комплектация:
Робот поставляется уже в собранном виде и включает в себя:
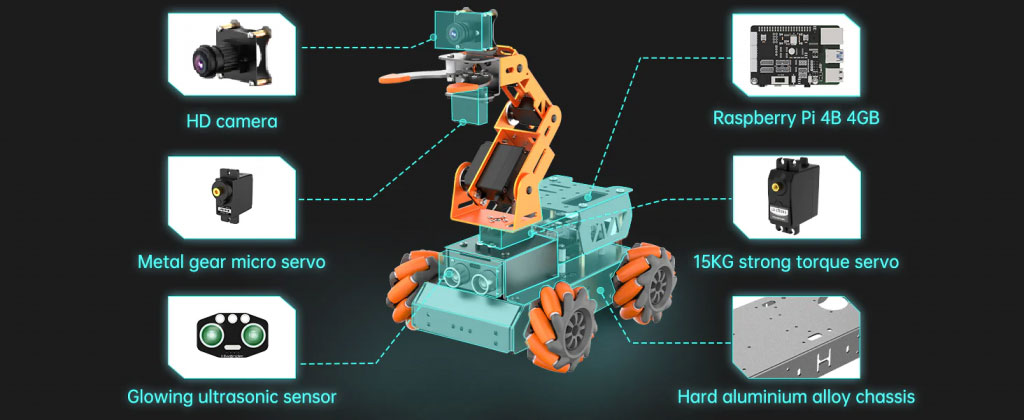
Контроллер Raspberry Pi 4B 4GB.
Плата расширения Raspberry Pi для дополнительных подключений к контроллеру.
Ультразвуковой датчик с подсветкой - служит как дополнительное зрение робота, для широкой настройки.
Сервопривод LFD-01M, современный распространенный сервопривод, для движения. Весит 14 грамм, использует питание 4.8-6 Вольт. И имеет угол поворота 0-180 градусов.
Сервопривод LD-1501MG, современный распространенный сервопривод, для нагрузок. Весит 14 грамм, использует питание 6-8.4 Вольт. И имеет угол поворота 0-240 градусов.
Колеса всенаправленного движения - для маневрирования в любых направлениях.
Камера, имеет разрешение 640х480, используется для компьютерного зрения. Имеет угол обзора в 120 градусов.
5-ти осевой манипулятор - используется для перемещения объектов.
Зарядное устройство для литиевых аккумуляторов напряжением в 11.1 вольт.
Кабель USB - USB micro для подключения к контроллеру и загрузки программ.
Набор запасных частей для замены утерянного/изношенного оборудования.
Отвертка для съема, либо для замены модулей.
Работа с набором включает в себя несколько этапов:
Исследовательский уровень: учащиеся познакомятся со сложной кинематикой, основами тригонометрии, физическими основами работы датчиков, изучат основы текстовых языков программирования, и научатся использовать существующие программы для изучения работы робота, изучения программ движения и других встроенных паттернов. Видоизменять программы движения и паттернов, создавать свои программы для OpenCV.
Продвинутый уровень: учащиеся могут изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки. Это позволит создавать собственные паттерны(скрипты) поведения робота, сложные схемы работы робота с распознаванием объектов, обучением и манипулирования окружающими объектами.
Проектный уровень: учащиеся могут создавать собственные научные проекты на базе данного набора, используя возможности контроллера по добавлению и программированию дополнительных модулей.





