При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
6-осевой AI робот-манипулятор 280 серии Jetson Nano создан для обучения по направлениям: искусственный интеллект, машинное зрение и программирование. Роборука обладает мощным вычислительным модулем NVIDIA Jetson Nano, поддерживающим аппаратное ускорение обработки данных и работу с нейросетями.
Кобот манипулятор обеспечивает возможности для анализа изображений, проектирования и тестирования алгоритмов робототехники, а также изучения архитектуры ROS, что делает его эффективным инструментом для инженерных лабораторий и образовательных центров в области ИИ и мехатроники.
Возможности учебного робота-манипулятора
Кобот робот открывает широкие возможности для учебных экспериментов и проектных задач:
- Обучение и разработка AI-алгоритмов и компьютерного зрения;
- Быстрая обработка изображений с помощью Jetson Nano GPU;
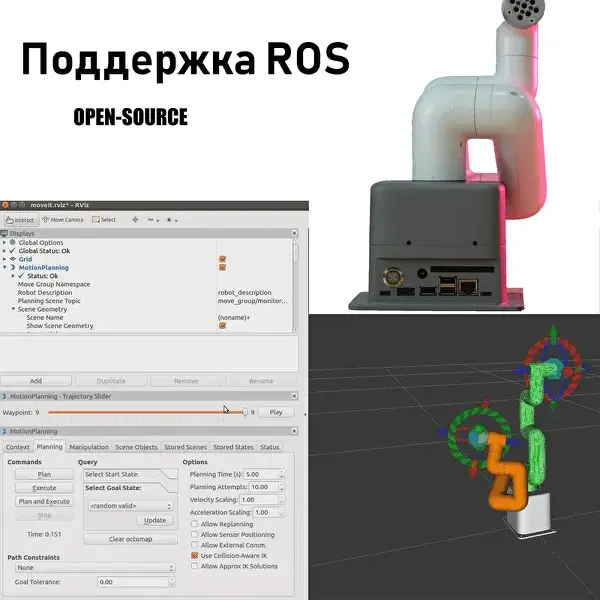
- Обучение основам ROS (Robot Operating System) и симуляциям в MoveIt и RViz;
- Программирование на Python, C++, MyBlockly;
- Моделирование промышленных процессов;
- Работа с LEGO-совместимыми интерфейсами и модулями Grove;
- Управление через USB, Wi-Fi и Bluetooth, а также режим Drag&Teach (обучение движением).
Коллаборативный робот. Технические особенности
Программируемый манипулятор оснащён шестью высокоэффективными сервомоторами и системой двойного управления (Dual Core: Jetson Nano + M5Stack Atom), что обеспечивает точное движение и быструю обработку данных. Робот работает под управлением Ubuntu Mate 18.04 с предустановленной поддержкой ROS1/ROS2, OpenCV, Python и библиотек для машинного обучения.
Основные характеристики:
- 6 степеней свободы (6 DOF);
- Рабочий радиус — 280 мм;
- Max нагрузка — 250 г;
- Точность позиционирования — ±0,3 мм;
- Процессор: NVIDIA Jetson Nano + M5Stack Atom ESP32;
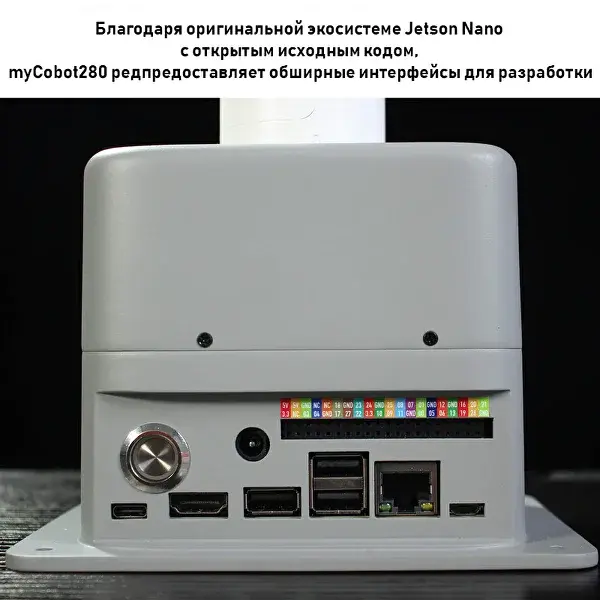
- Интерфейсы: USB ×3, HDMI, RJ45 (Gigabit Ethernet), GPIO ×40;
- Поддержка ROS, MoveIt, RViz, OpenCV;
- Визуальная LED-матрица 5×5;
- Подключение: USB, Wi-Fi, Bluetooth.
Программируемая рука манипулятор имеет полностью открытую архитектуру open-source, что обеспечивает возможность кастомизации, написания собственных драйверов и интеграции с различными сенсорами, ROS-пакетами и библиотеками Python.
Комплект машинного зрения с камерой и AI-модулем. С его помощью роборука может распознавать объекты, определять их форму, цвет и расстояние. Используется в проектах по 3D-визии, машинному обучению и компьютерному зрению.
3D-камера может практически полностью удовлетворить ваши потребности в захвате в большинстве сценариев благодаря интеллектуальной поддержке неупорядоченного захвата.
Надёжное G-образное основание для устойчивого крепления робота кобота на столе или учебной платформе. Обеспечивает точность позиционирования и безопасность во время практических демонстраций.
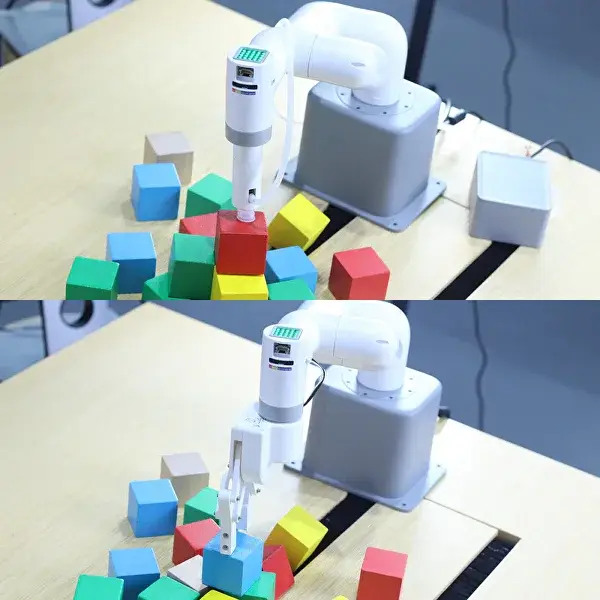
Интеллектуальный адаптивный захват для работы с объектами разной формы и размера. Автоматически подстраивается под предмет, делая демонстрации максимально реалистичными — от сортировки до сборки.
Компоненты робота манипулятора. Комплектация поставки
1. Роботизированная рука 280 Jetson Nano. Основной модуль с вычислительной платформой Jetson Nano, системой Dual Core и высокоточными сервомоторами.
2. Artificial Intelligence (AI) 3D Vision Kit. Комплект машинного зрения с камерой, позволяющий распознавать объекты, цвета, жесты и QR-коды.
3. G Shape Base 2.0. Жёсткое основание, обеспечивающее устойчивость и безопасность при учебной работе.
4. myCobot Adaptive Gripper. Интеллектуальный захват, автоматически подстраивающийся под форму предмета, для сборочных и исследовательских задач.