При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
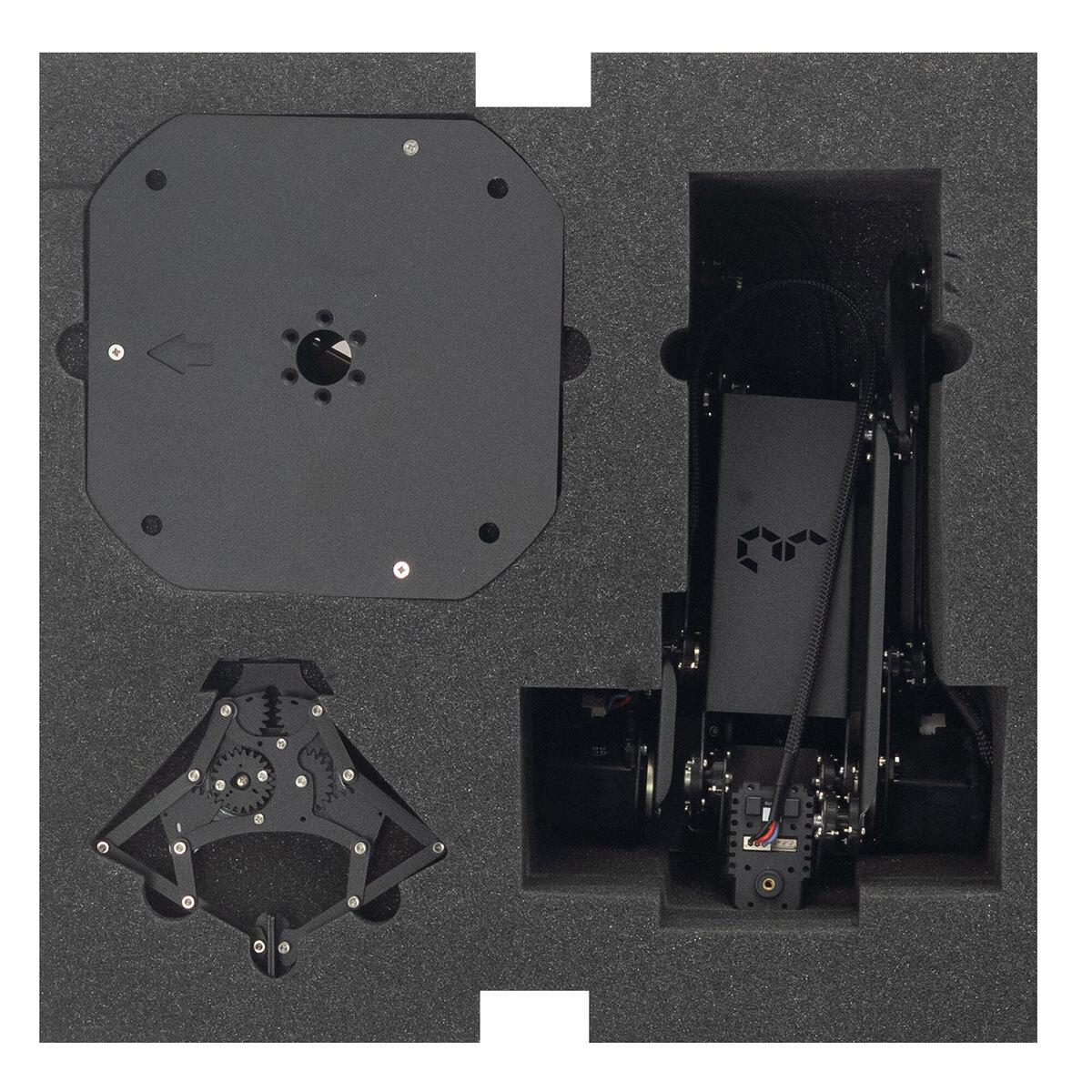
Учебный манипулятор с плоско-параллельной кинематикой для применения в рамках соревнований в области промышленной автоматизации и «Интернет вещей».
Учебный манипулятор реализован на основе интеллектуальных сервомодулей Dynamixel и специализированной системы управления. Благодаря применению высококачественных сервомодулей Dynamixel, применяемых в профессиональной деятельности в сфере робототехники, учебный манипулятор обладает повышенной точностью и повторяемостью позиционирования исполнительного органа (схвата) по сравнению с какими-либо другими учебными моделями. Наличие встроенной системы управления сервомодулей Dynamixel и множества обратных связей обеспечивает возможность гибкой настройки и управления манипулятором в процессе его работы.
Технические особенности:
- Сбалансированные оси вращения с подшипниковыми узлами.
- Наличие крепежа для модуля технического зрения на схвате манипулятора.
- Манипуляционный РТК выполнен на базе сервомодулей Dynamixel: МХ-64Т – 2 шт, МХ-28Т – 1 шт, АХ-12А – 2 шт (или сервомодули Dynamixel с более лучшими техническими характеристиками).
- Радиус зоны сервиса - не менее 30 см.
- Номинальная грузоподъемность – 250 грамм.
- Для управления РТК используется программируемый контроллер STEM Board c возможностью встраивания модулей расширения:
- Программируемый контроллер OpenCM – наличие,
- Встраиваемый одноплатный микрокомпьютер – отсутствует (приобретается опционально). - Наличие сетевого адаптера для питания от сети 220В.
- Наличие интерфейсного кабеля для программирования.
- Поставляется в деревянном боксе для хранения и транспортировки.
Учебный манипулятор обладает встроенным программным обеспечением для коммуникации с облачным сервером РТС ThingWorx, применяемым для разработки приложений на основе технологий «Интернет вещей». Встроенная система управления учебного манипулятора обеспечивает возможность объединения аналогичных учебных моделей в единую информационную систему для управления группой роботов в рамках решения учебной технологической задачи.
Манипуляторы с плоско-параллельным типом кинематической схемы могут применяться для перемещения рабочего инструмента параллельно горизонтальной плоскости в цилиндрической системе координат относительно основания. Важным преимуществом данной кинематики является повышенная грузоподъемность на схвате за счет облегчения конструкции манипулятора ближе к схвату за счет расположения приводов в основании. В большинстве случаев подобные манипуляторы применяются для выполнения задач по перемещению грузов большой массы в машиностроении или логистике.
Учебный манипулятор представляет собой доступную учебную модель промышленного манипуляционного робота, обеспечивающую возможность на практике изучить большинство аспектов разработки систем управления манипуляционных роботов с угловым типом кинематики, а базовых принципов применения робототехники при автоматизации технологических процессов.