Беспроводное управление по радиоканалу – наиболее часто встречающееся решение в робототехнике. Для гарантированной передачи данных между устройствами применяются различные протоколы передачи информации. В случае если совместно работающих устройств достаточно много, их объединяют в беспроводные сети и используют сетевые протоколы передачи данных. ZigBee – стандарт высокоуровневых протоколов беспроводной связи, применяемый массово при автоматизации промышленного оборудования, в системах автоматизации зданий и жилых gомещений, в медицинском и телекоммуникационном оборудовании. Отличительная особенность стандарта ZigBee заключается в его высокой помехозащищенности, низком энергопотреблении и отсутствии необходимости получения частотного разрешения. Благодаря стандартизации и открытой спецификации различные производители электронных устройств могут разрабатывать собственные устройства совместимые с устройствами, использующими протокол ZigBee.
На сегодняшний день радиомодули ZigBee используются в системах с невысокой скоростью передачи данных на небольшие расстояния, но требующие гарантированной безопасности канала связи и точности доставки информации при крайне низком энергопотреблении. Низкое энергопотребление обусловлено функцией «спящий режим» во время простоев, но в отличие от модулей Bluetooth, время пробуждения радиомодулей ZigBee в разы меньше. Поэтому реакция устройств на передаваемые сигналы намного быстрее.
Для управления моделями роботов с помощью радиоканала на базе протокола ZigBee в робототехнических конструкторах ROBOTIS применяются специальные модули: ZIG-100/110A, ZIG2Serial, USB2Dynamixel.

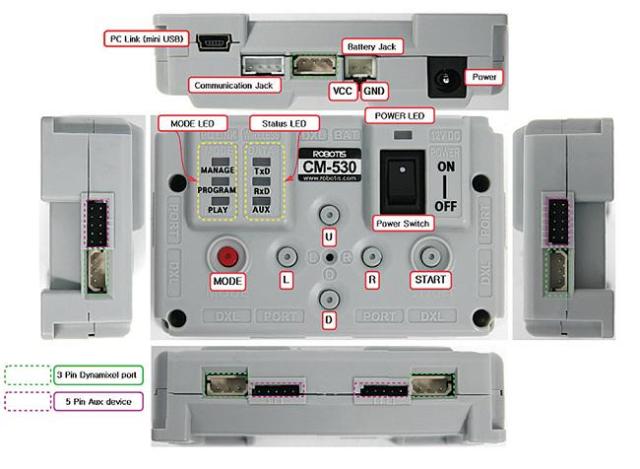
Радиомодуль ZIG-110A предназначен для последовательной передачи данных с помощью ZigBee интерфейса от внешнего устройства к контроллеру робота и обратно. Данный модуль полностью совместим с программируемыми контроллерами СМ-100 для наборов на базе конструкторов OLLO и СМ-530, для наборов на базе конструкторов Bioloid.
Для того чтобы компьютер и робот могли осуществлять взаимный обмен информацией, используются устройства ZIG2Serial и USB2Dynamixel.
Модуль ZIG-100 представляет собой радиомодуль ZigBee, предназначенный для встраивания в различные устройства, например ZIG-100 может быть встроен в пульт ДУ RC-100, а также использоваться для беспроводного управления роботами с помощью ПК.

Устройство USB2Dynamixel – это универсальный преобразователь интерфейсов USB персонального компьютера в последовательный интерфейс, применяемый в сервоприводах, контроллерах и беспроводных модулях ROBOTIS.
Настройка и установка соединения по интерфейсу ZigBee
Для настройки и установки соединения между компьютером и роботом необходимо подключить к контроллеру и компьютеру модули ZIG-100 и ZIG-110A, а после их настроить.
Для этого необходимо выполнить следующие шаги:
1. Подключить модуль ZIG-110A к порту Communication Jack на контроллере CM-530 и к порту программирования для контроллера СМ-100.
2. Подключить контроллер робота к компьютеру с помощью USB кабеля.
3. Включить питание контроллера.
4. Запустить RoboPlus и выбрать программу для настройки оборудования RoboPlus Manager
5. Выбрать порт, к которому подключен контроллер (по умолчанию COM3) и нажать Connect для подключения к контроллеру.
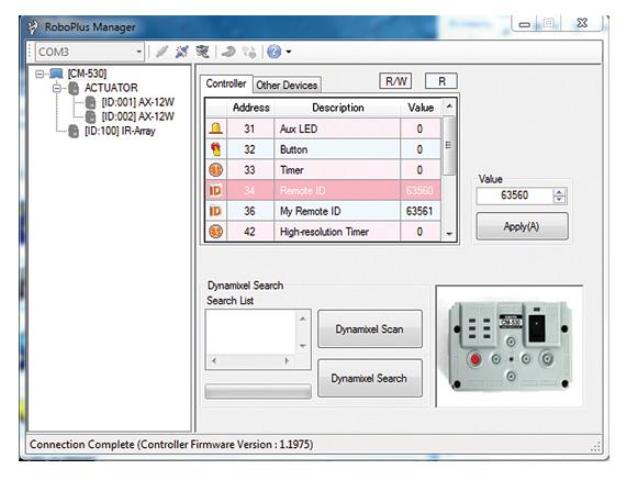
6. Во вкладке Controller должны появиться все подключенные к контроллеру устройства. Каждое устройство, с которым работает контроллер, обладает ID номером Модуль ZIG-110A распознается контроллером как устройство "My Remote ID" с ID 36. Модуль ZIG-100 распознается контроллером как устройство с именем «Remote ID» и идентификатором ID 34.
Примечание: в случае применения контроллера СМ-100 ID номера явным образом не доступны пользователю, поскольку к данному контроллеру подключается ограниченное количество устройств с заранее известными идентификационными номерами. Если же используется контроллер СМ-530, необходимо указывать ID номера подключаемых к нему устройств.
7. Каждое из устройств имеет собственное значение Value. В рассматриваемом случае модуль с ID 34 имеет значение 63560, а значение модуля с ID 36 равно 63561.
8. Для того чтобы радиомодули с разными ID работали в паре, необходимо, что-бы значение внешнего модуля ZIG-100 равнялось значению модуля ZIG-110A, подключенного к контроллеру. Если выявлено несовпадение, то необходимо в графу Value внести требуемое значение и нажать кнопку Apply.
9. Подключение модуля ZIG2Serial к компьютеру осуществляется с помощью устройства USB2Dynamixel. Для совместной работы двух устройств необходимо установить ZIG2Serial в разъем СОМ-порта USB2Dynamixel и перевести переключатель выбора режимов в положение, соответствующее RS232.
10. Подключите модуль USB2Dynamixel в USB порт компьютера. Дождитесь того, чтобы компьютер распознал подключенное внешнее устройство.
11. Запустите RoboPlus и RoboPlus Manager.
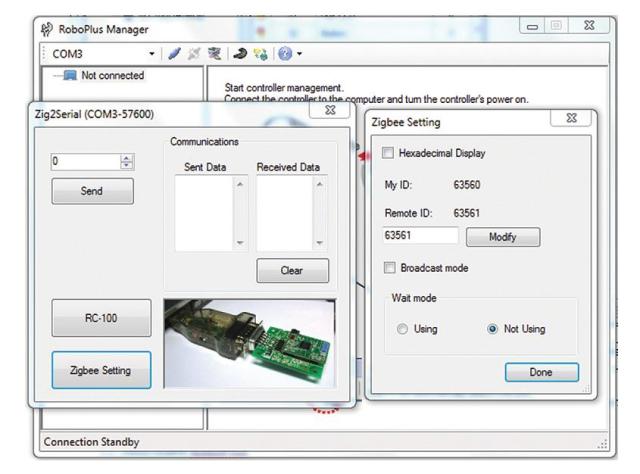
12. Выберите номер порта, к которому подключен USB2Dynamixel (по умолчанию СОМ3) и нажмите на кнопку Zig2Serial Management.
13. Войдите в меню ZigBee Setting (удерживайте кнопку в нажатом состоянии в течение 3 секунд). В появившемся меню необходимо ввести значение Value, соответствующее значению My Remote ID (в рассматриваемом примере значение, соответствующее ZIG-110A, равно 63561).
14. Проверьте соединение радиомодулей. Включите устройства, если настройки были произведены верно, то светодиоды модулей Zig2Serial и ZIG-110A, которые мигали, начнут гореть ровным светом.
15. Проверьте соединение радиомодулей. Запустите виртуальный пульт управления RC-100 (данная функция доступна для контроллеров СМ-530).
16. Переведите контроллер СМ-530 в режим PLAY с помощью кнопки MODE и нажмите на кнопку START.
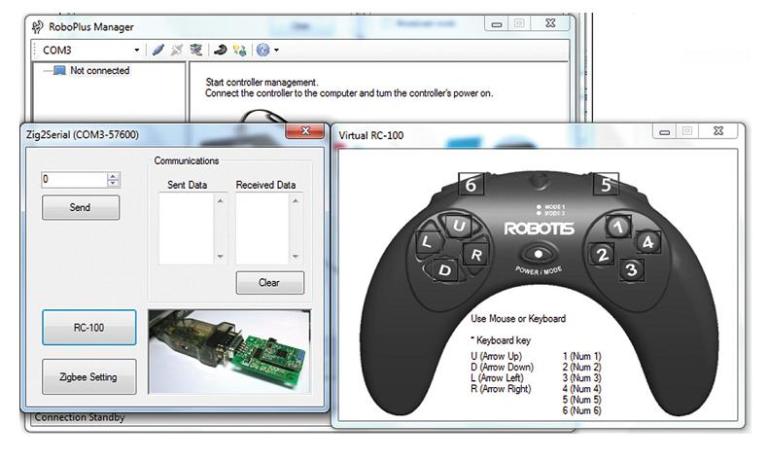
17. С помощью открывшегося виртуального пульта управления можно путем нажатия кнопок U, L, R и D управлять движением робота. Для этого необходимо, чтобы в контроллер робота была записана одна из тестовых программ, которую можно скачать с официального сайта ROBOTIS или скачать из Help среды разработки RoboPlus.
Материал с сайта robotgeeks.ru

