Одна из ключевых задач мобильной робототехники – это поиск маршрута для движения и его оптимизация. Перемещаясь в рабочей местности, робот должен постоянно оценивать окружающую обстановку, определять свое положение и положение окружающих его объектов. Существует множество различных способов, с помощью которых робот может определять собственное положение и строить маршрут между точками назначения. При перемещениях на улице применяется технология спутниковой навигации, а окружающие объекты обнаруживаются с помощью камер или дальномеров. В случае перемещения внутри помещений с помощью камер и дальномеров строится виртуальная модель пространства, по которой робот ориентируется в дальнейшем. Вышеописанные методы имеют общий характер и применимы в произвольных ситуациях, но из-за этого они очень сложны в реализации и еще не применяются широко в повседневной жизни.

Как правило, автономные робототехнические системы проектируются под конкретные задачи. Такой подход позволяет формализовать требования к системе и разработать все возможные алгоритмы реакции на изменение состояния окружающей обстановки.
Например, одной из достаточно жестко формализованных задач может быть перемещение объектов внутри производственного помещения. Как правило, при перевозке грузов на складах или в производственных цехах роботы преодолевают один и тот же маршрут постоянно. Соответственно данный маршрут заранее известен и для него можно разработать систему управления движением робота.
Ранее цеховые транспортные средства представляли собой тележки, перемещающиеся по рельсам. С ростом науки и техники на смену им пришли робокары – мобильные роботы разных типов и для различных задач, а рельсы, проложенные вдоль цеха, заменила паутина направляющих линий, начерченных на полу.
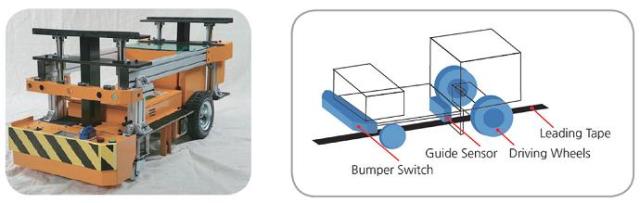
Мобильные роботы, передвигающиеся в цехах вдоль линии, подобно роботам из предыдущих лабораторных работ оснащаются различными сенсорными устройствами для восприятия окружающей обстановки: ИК-датчиками, камерами, датчиками безопасности и т.п. Но в отличие от рассматриваемых ранее роботов, реальные роботы работают отнюдь не в лабораторных условиях – зачастую направляющая линия может быть повреждена или скрыта за каким-либо объектом, некоторые маршруты могут пересекаться или вовсе прерываться частично.

На реальный маршрут могут накладываться различные ограничения, например: некоторые участки маршрута могут быть запрещены для движения, а некоторые могут быть достигнуты только после проезда через другие.
Становится очевидным, что методы движения вдоль линии, представляющей собой замкнутую траекторию, не совсем приемлемы в подобном случае. С примерами различных алгоритмов движения вдоль линии можно ознакомиться в предыдущих работах, но сразу же можно сделать вывод о том, что ни один из них не учитывает прерывистости траектории движения или наличия на ней пересечений.
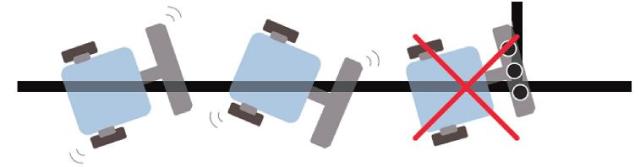
Если в процессе движения управляющая программа мобильного робота окажется не в состоянии определить наличие пересечения направляющих линий, это может привести к неоднозначности принятия решения.
При переезде пересечения линий система управления мобильного робота получит данные, свидетельствующие о том, что направляющая линия находится одновременно и справа и слева относительно робота. Соответственно процесс принятия решения о последующих маневрах будет нарушен.

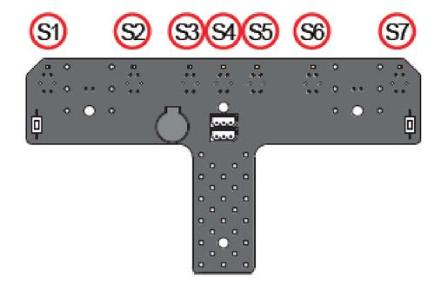
Для того распознавания пересечений направляющих линий может применяться множество различных способов, например в подобных целях достаточно часто применяются камеры. Но обработка изображений требует большой производительности бортового компьютера робота, поэтому такие решения не всегда применимы. В данной работе рассматривается способ управления мобильным роботом с помощью информации, поступающей от массива ИК-датчиков. С помощью массива из семи датчиков S1-S7 становится возможным определить местоположение пересечений линий. Поскольку вариантов наиболее вероятных пересечений достаточно много, следует настраивать управляющую программу робота на максимально возможное количество допустимых вариантов, определенных на основании показаний ИК-датчиков.
Выполнение маневров вблизи перекрестков
В процессе движении вдоль маршрута, представляющего собой пересекающуюся линию, помимо отслеживания линии необходимо осуществлять выбор направления движения на каждом из перекрестков. Прохождение правильной последовательности перекрестков дает возможность проехать заданный маршрут верным образом.
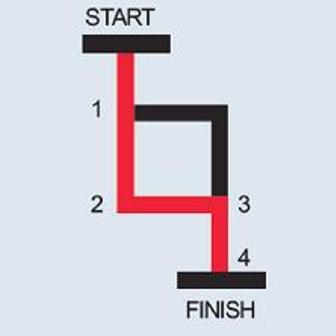
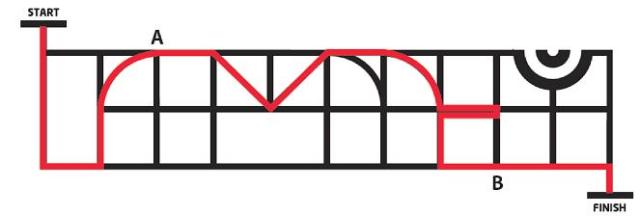
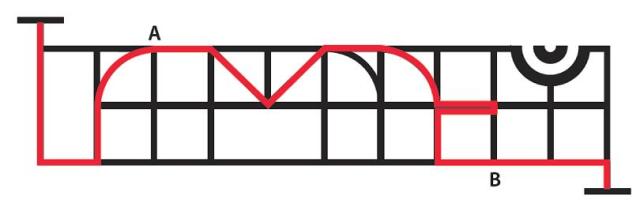
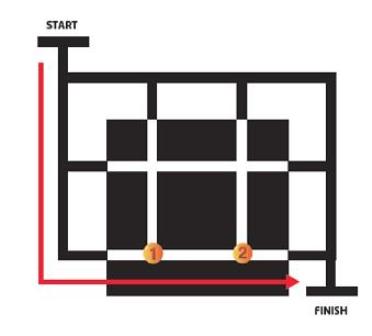
В рамках данной работы предлагается разработать программу следования вдоль заданного маршрута. В качестве примера рассмотрим базовый маршрут, приведенный на рисунке. Чтобы разработать программу для движения вдоль данного маршрута на нем необходимо выделить особые точки, являющиеся пересечениями маршрута или его разрывами. Для того чтобы робот доехал до финиша, он должен следовать вдоль линии и пройти четыре указанные точки.
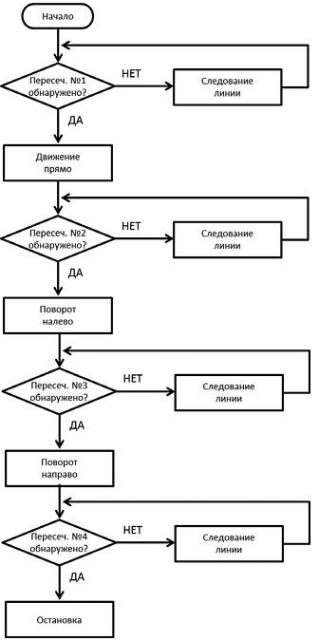
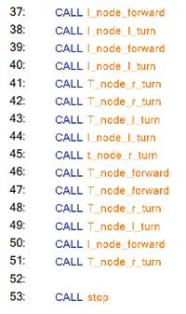
Движение по заданному маршруту определяется алгоритмической последовательностью, которая задает один из маневров в каждой из ключевых точек. В частности, в приведенном примере на первом пересечении маршрута робот продолжает движение в прямом направлении, на втором поворачивает налево, а на третьем – направо и следует до финишной черты.
Аналогичным образом можно разработать программу движения робота вдоль любого из более сложных маршрутов. Для этого всего лишь необходимо задать последовательность движения робота через пересечения маршрута.
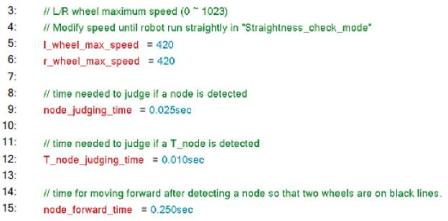
Управляющая программа сводится к поочередному поиску каждой из точек заданной последовательности. Каждая из точек описывается собственной функцией, с помощью которой она распознается, а также скоростью прохождения данного участка, которая определяется на стадии инициализации программы.
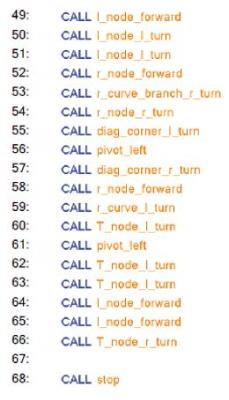
Текст программы представляет собой последовательность поочередных вызовов функций, задающих требуемое движение. Для того чтобы варьировать направление движения робота вдоль линии, необходимо всего лишь поменять очередность вызова функций.
Вышеуказанные функции можно разделить на два основных типа:
1) Функции, осуществляющие поворот робота на Т-образных и Г-образных перекрестках.
2) Функции, с помощью которых робот движется до ближайшего перекрестка без каких-либо действий.
В первом случае функция состоит из двух отдельных операций – вызова функции движения вперед и вызова функции поворота в заданном направлении.
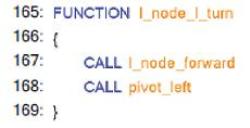
Функция l_node_l_turn предназначена для осуществления поворота налево на ближайшем левом пересечении. Функция состоит из двух других функций: l_node_forward отвечающей за движение до ближайшего Г-образного перекрестка с поворотом налево, и pivot_left, за сам отвечающей за поворот налево.
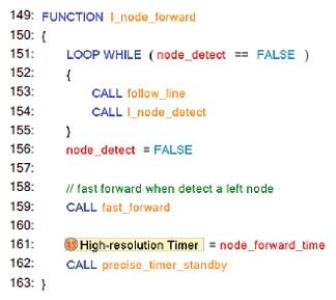
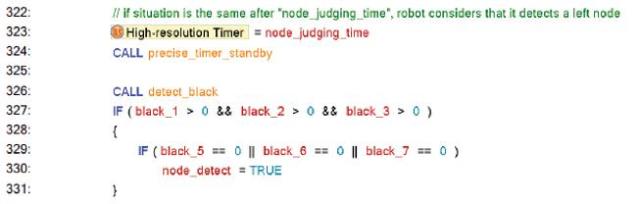
Функция l_node_forward в бесконечном цикле ищет точку пересечения траекторий с помощью функции l_node_detect. Во время поиска робот постоянно следует линии с помощью функции follow_line. После обнаружения точки пересечения маршрутов робот совершает кратковременный рывок вперед, ограниченный временем таймера, для того чтобы слегка сместиться для дальнейшего поворота налево. Данное перемещение крайне важно, для того чтобы после маневра робот оказался по центру направляющей линии. Особое внимание следует уделить процессу распознавания точек пересечения маршрута. Очевидно, что в процессе движения робота по маршруту могут возникнуть различные ситуации, но большинство из них можно описать формальными признаками, например по срабатыванию ИК-датчиков.
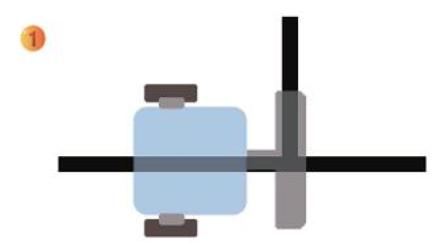
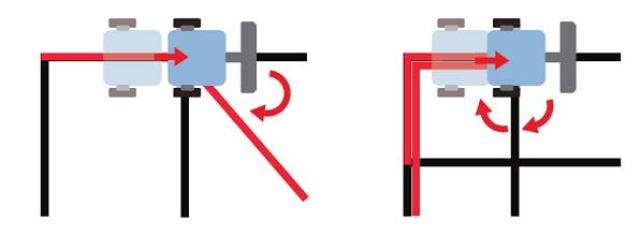
Рассмотрим процесс движения робота через участок маршрута с левым поворотом. Очевидно, что в процессе движения робота часть ИК-датчиков попадет на черную линию и возникнет одна из ситуаций, проиллюстрированных ниже.

На рисунке черным цветом отмечены ИК-датчики, расположенные над черной линией, в свою очередь белым цветом – расположенные над белым участком поверхности. В процессе движения робота можно опросить каждый из датчиков и с помощью перебора вариантов определить текущее положение робота.
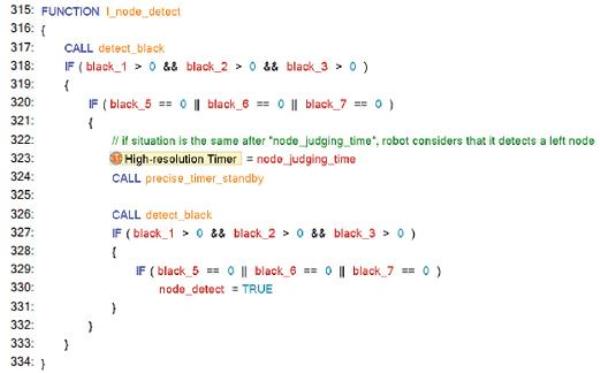
В приведенной выше функции описывается процесс распознавания левого Г-образного поворота. Согласно приведенному алгоритму под подобной точкой маршрута понимается участок траектории, на котором срабатывают ИК-датчики № 1, № 2, № 3.
Подобным образом можно распознать любой участок маршрута. На первый взгляд это может показаться достаточно простой задачей, но стоит уделять повышенное внимание точности распознавания текущего положения. На точность работы программы могут влиять качество рабочей поверхности, скорость движения робота. Для повышения точности работы программы в функции l_node_detect реализован механизм защиты от ложных срабатываний. Одно и то же условие проверяется дважды после программируемой задержки.
Меры повышения точности работы управляющей программы крайне важны при разработке системы управления. Пренебрежение ими может привести к некорректной работе алгоритма и всей робототехнической системы в целом.
Выполнение сложных маневров
В реальных ситуациях мобильные роботы перемещаются не только по прямолинейным участкам маршрута, но и по криволинейным траекториям, а также выполняют различные маневры.
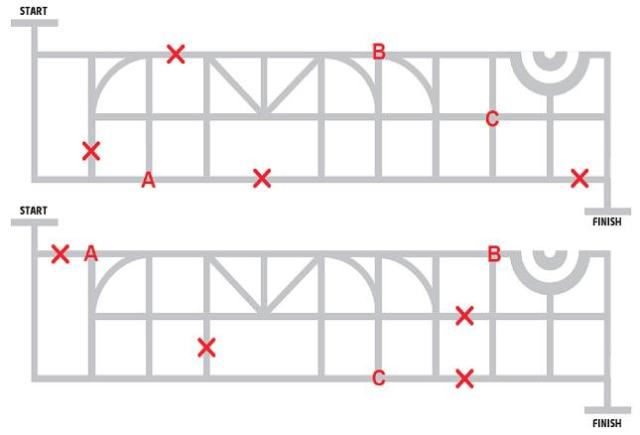
Чем больше система управления содержит в себе описаний подобных маневров, тем более сложные маршруты может преодолевать робот. Например, на подобии того маршрута, что приведен ниже на рисунке.
В целом программа управления идентична программе, рассматриваемой в предыдущей части. Также как и для любой другой программы задается последовательность прохождения узлов траектории.
По сравнению с предыдущей частью работы добавились два новых типа движений – движение по дуге окружности и движение по диагонали, причем каждое из этих движений различается по направлениям.
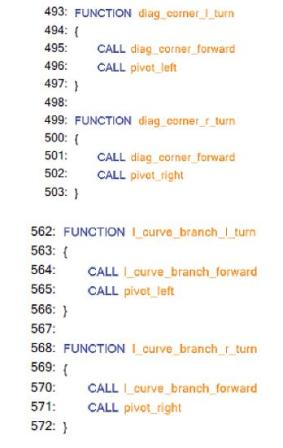
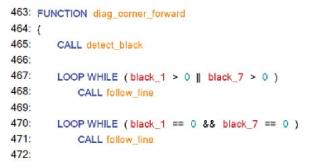
Каждая из этих функций состоит из функции следования маршруту - diag_corner_forward, I_curve_branch_forward и функции поворота в требуемом направлении – pivot_left, pivot_right. Контроль за движением робота вдоль линии под углом осуществляется с помощью ИК-датчиков № 1 и № 7, которые задают положение робота над линией. Если же робот оказывается над линией, то запускается функция follow_line, с помощью которой робот отслеживает собственное положение относительно линии и центрируется на ней с помощью ИК-датчика № 4.
Следование линии нацелено в первую очередь на движение вдоль нее с ориентацией центра робота над линией. Поскольку центр робота совпадает с ИК-датчиком № 4, функция follow_line стремится минимизировать отклонения ИК-датчиков № 3 и № 5 относительно линии.
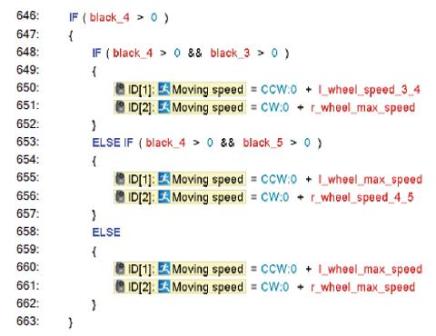
Суть данного процесса сводится к выполнению ряда условий:
1) Если ИК-датчик № 4 находится над линией, то робот едет прямолинейно с максимальной скоростью.
2) Если один из ИК-датчиков № 3 или № 5 обнаружил линию, то робот поворачивается в противоположном направлении с минимальной скоростью.
Во время следования линии изменяется, в зависимости от положения робота, скорость его маневрирования. Это сделано из-за того, что в некоторых ситуациях необходимы плавные движения робота, чтобы он не съехал с линии, например при маневрировании между датчиками № 3 и № 5.
В случае же если робот отклонился от линии достаточно сильно, необходимо скорректировать его положение максимально быстро, поэтому скорость его движения увеличивается.
За изменение скорости движения робота отвечает функция change_speed, которая задает скорость вращения приводов в процентном соотношении от значения максимальной скорости.
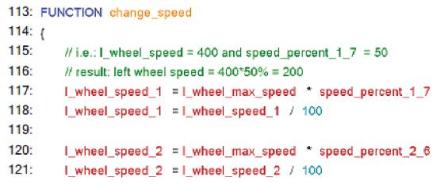
Помните, что соблюдение скоростного режима – одно из важнейших условий, влияющих на движение робота по заданному маршруту. Одно из важнейших требований к алгоритму управления мобильным роботом – соблюдение оптимальной скорости для данного участка маршрута.
Соблюдение скоростного режима – это не просто требование безопасности движения, это в первую очередь требование, позволяющее минимизировать ошибки работы управляющей программы робота. Стоит помнить, что скорость движения робота существенным образом влияет на качество распознавания узловых точек маршрута и ориентацию самого робота относительно направляющей линии.
Основная цель разработчика робототехнических систем – это обеспечение качественной и безотказной работы в процессе функционирования. Ради этого можно пожертвовать многим – производительностью, ресурсоемкостью и т.п., в том числе и быстродействием.
Заключение
Данная лабораторная работа наиболее важная среди работ, рассмотренных ранее. Это обусловлено не только сложностью преподносимого материала, но и затронутыми важными проблемами, такими как обеспечение точности и качества работы робототехнических систем.
Цель данной работы продемонстрировать, что не только внешние факторы влияют на качество работы того или иного робота. Существенное влияние на процесс выполнения поставленной задачи может оказывать сам робот, функционирующий на основании программы управления.
Рассмотренные в обеих частях программы наглядно демонстрируют влияние скорости движения на качество прохождения заданной траектории. Для закрепления результатов работы можно исследовать движение робота по приведенному ниже маршруту, сочетающему в себе все возможные маневры, рассмотренные ранее.
Помимо сложности маршрута и скорости движения на функционирование робота существенное влияние оказывает качество поверхности, по которой осуществляется движение. Вполне возможна ситуация, что линия, вдоль которой должен передвигаться робот, может оказаться поврежденной или даже закрашенной.
Разработчик робототехнической системы должен предусмотреть все возможные варианты применения своего проектного решения. Чем больше всевозможных влияющих факторов будет учтено на стадии проектирования, тем точнее и качественнее будет функционировать робот.
Материал с сайта robotgeeks.ru





























