При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
Робот для изучения Robot Operation System (ROS) и ОС Linux. Предназначен для практических занятий в рамках учебных курсов и самообразования для школьников и студентов.
Что такое Robot Operation System?
ROS – это открытый фреймворк для написания программного обеспечения роботов, работающий как мета-операционная система на базе ОС Linux.
Он был разработан в 2007 году и на сегодняшний день это наиболее популярный инструмент для создания ПО для роботов общего назначения.

ROS включает набор инструментов, библиотек
и драйверов, упрощающих создание сложного ПО для роботов, функционирующих на базе различных платформ.
Основная миссия ROS - поддержать многократное повторное использование кода вместо написания его с нуля в робототехнических системах.
Зачем нужен робот Turtlebro?
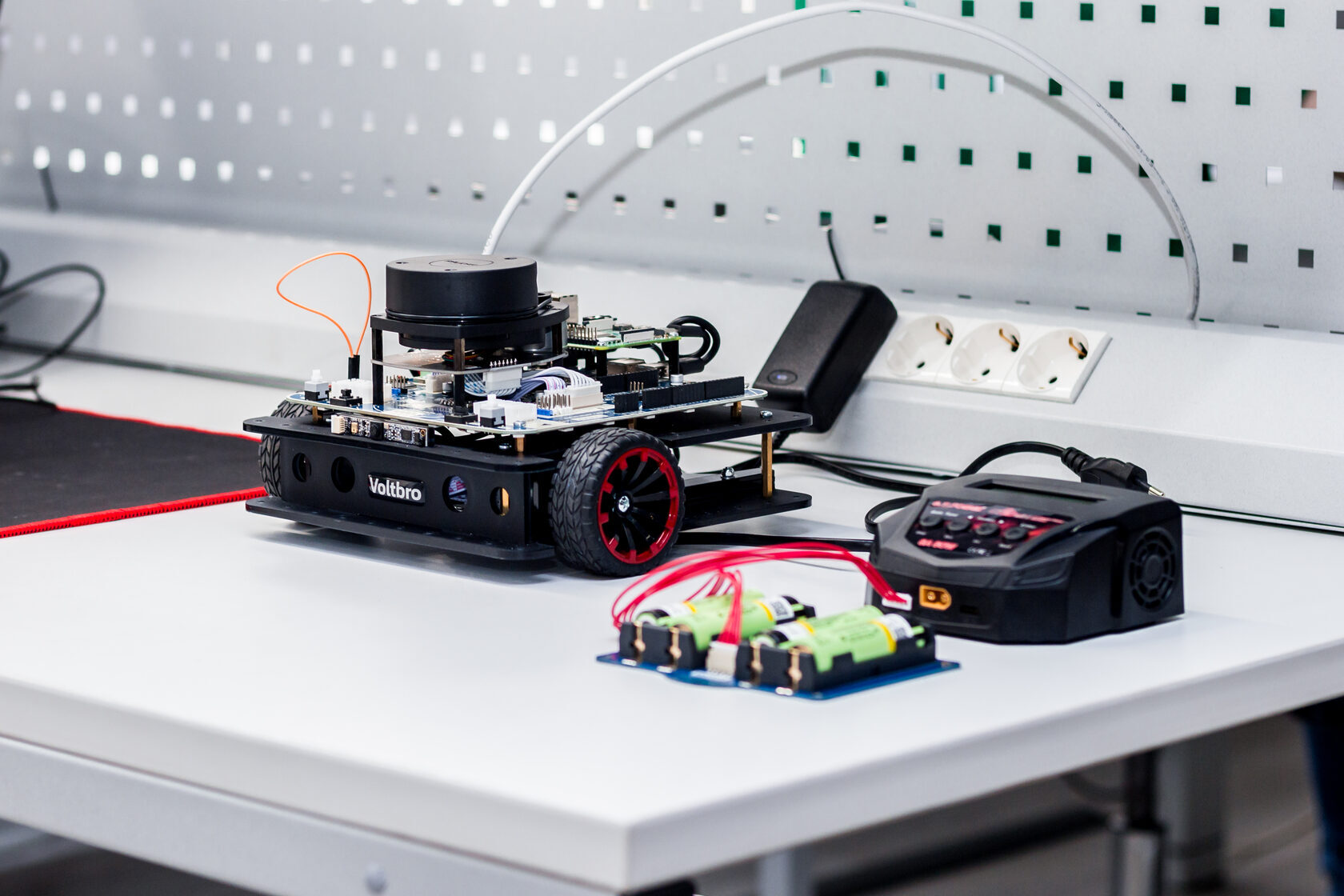
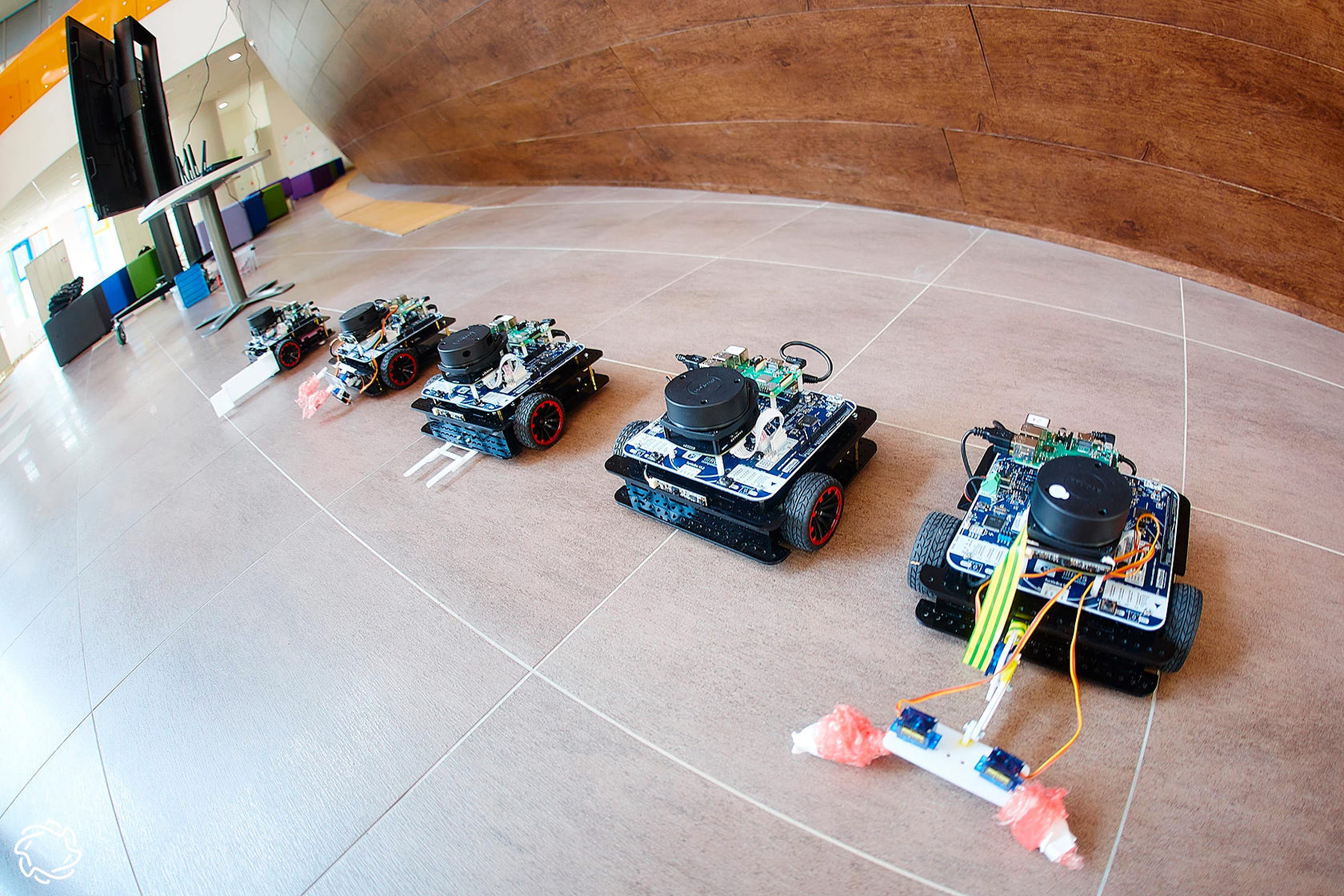
TurtleBro – учебно-методический комплекс, включающий программную и аппаратную платформу для изучения Robot Operation System (ROS), OС Linux и принципов разработки современной робототехники.
Робот предназначен для практических занятий в рамках учебных курсов и самообразования для школьников и студентов.
Платформа полностью совместима с TurtleBot, и при это обладает широким набором дополнительных возможностей. 
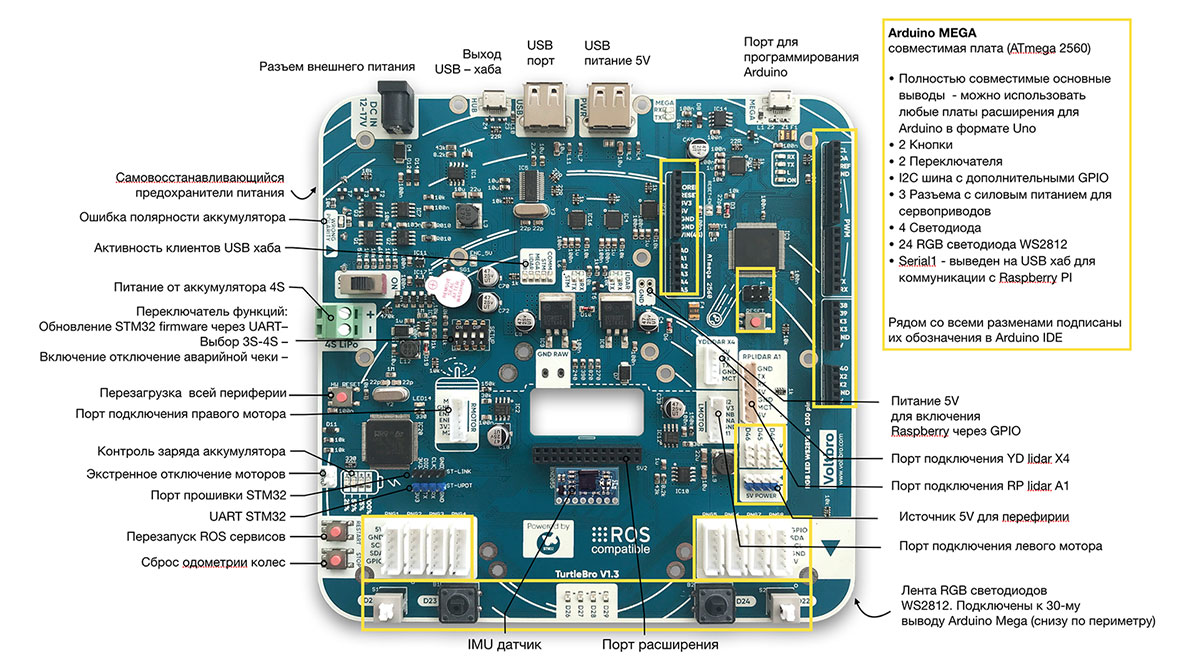
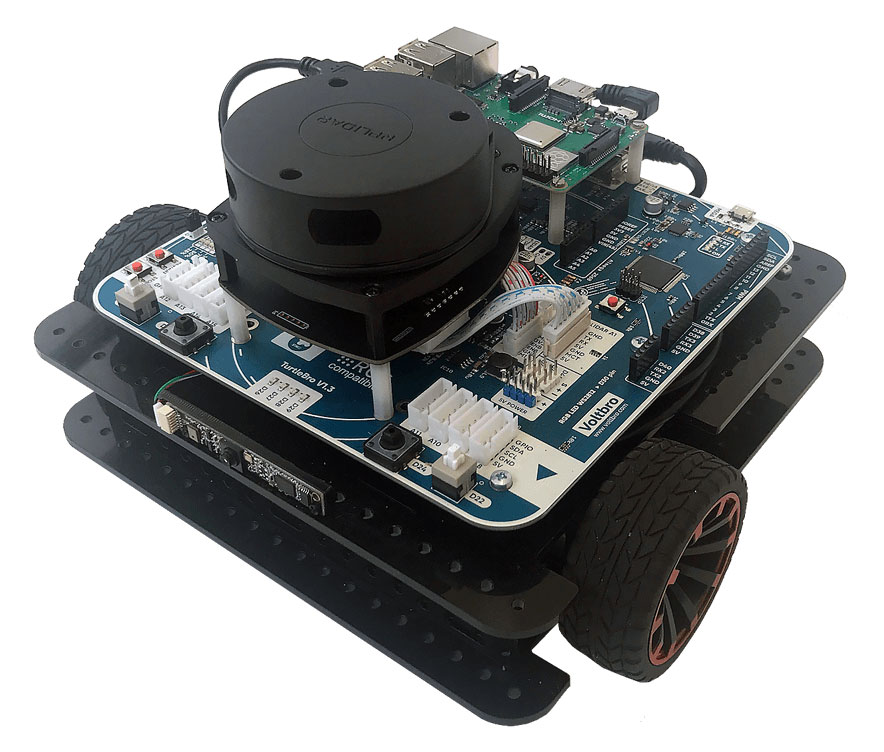
Сердце робота – плата управления TurtleBro собственной разработки
Плата интегрировала в себя весь базовый функционал, такой как: распределение питания, управление двигателями и работа с инерциальным датчиком. Управление реализовано на микроконтроллере STM32F4
с возможностью управления из ROS.
Для пользовательских приложений на плате реализован блок с микроконтроллером ATmega2560, совместимый с Arduino IDE и платами расширения Arduino, способный функционировать как самостоятельное устройство.
Плата обеспечивает интеграцию всех частей робота в единое устройство. Подключение управляющего микрокомпьютера
к компонентам робота - лидару, ардуино, двигателям и сенсорам - реализовано через единый USB-разъем.
Платформа ориентирована на создание пользователем роботов, пригодных для решения практические задач. Модульные разъемы обеспечивают возможность подключения множества дополнительных датчиков и устройств.
Робот позволит изучить:
- Принципы взаимодействия программной и аппаратной компонент роботов;
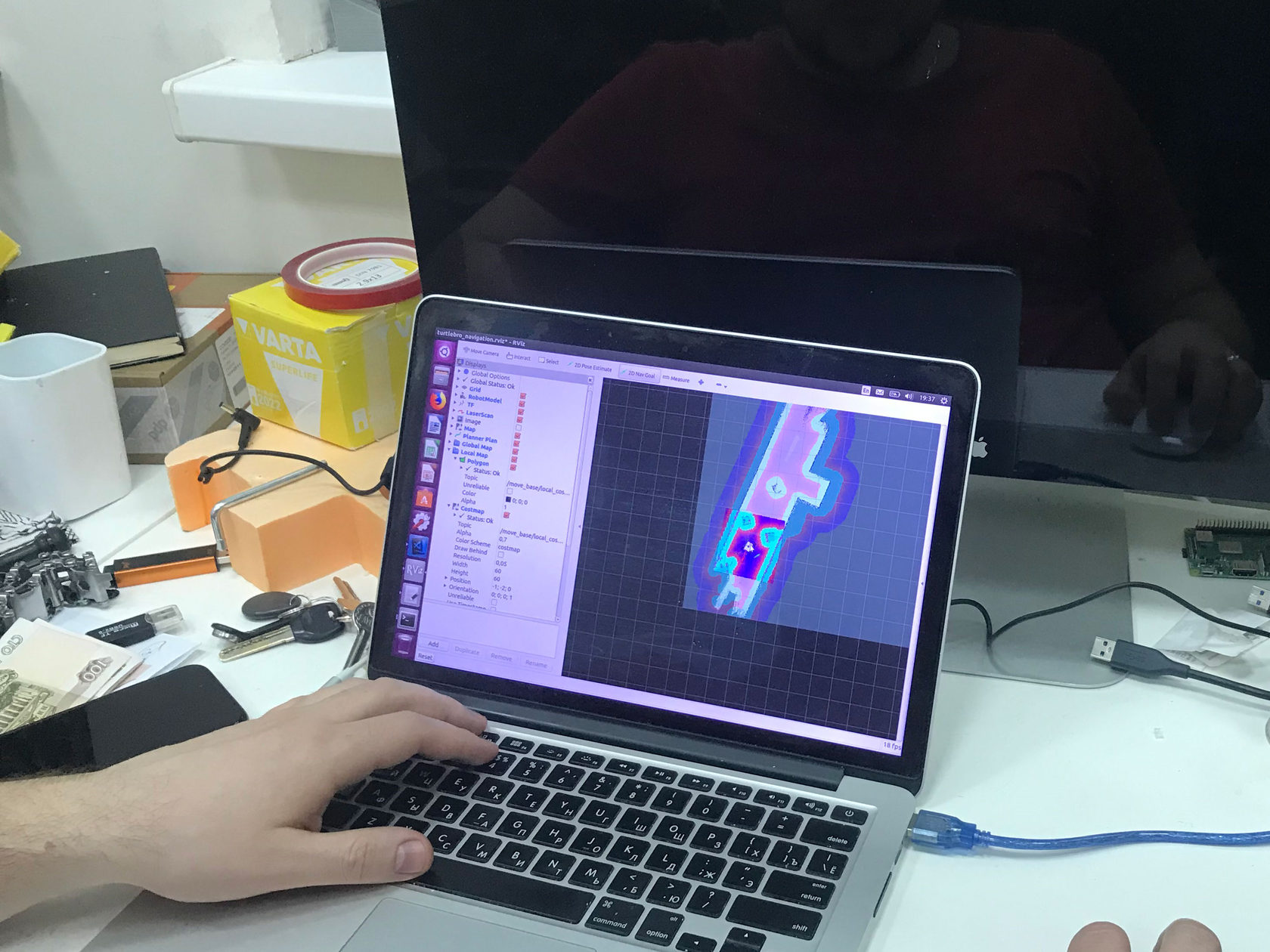
- Практические аспекты использования ROS;
- Автономную навигацию и построение карт;
- Работу с ROS на микроконтроллерах;
- Машинное зрение;
- Подключение и настройку дополнительных исполнительных механизмов
Образовательные материалы
Мы поддерживаем и развиваем русскоязычные образовательные материалы по Robot Operating System.
Для всех уже доступна книга "Введение в ROS" на русском языке,
а для тех, у кого есть робот, будут полезны инструкция и практические примеры работы с ROS.
Комплектация
- Мобильная платформа
- Системная плата
- Лазерный дальномер 360°
- Камера с микрофоном
- Микрокомпьютер Raspberry PI
- SD карта с настроенным ПО
- Блок аккумуляторов
- Зарядное устройство