При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
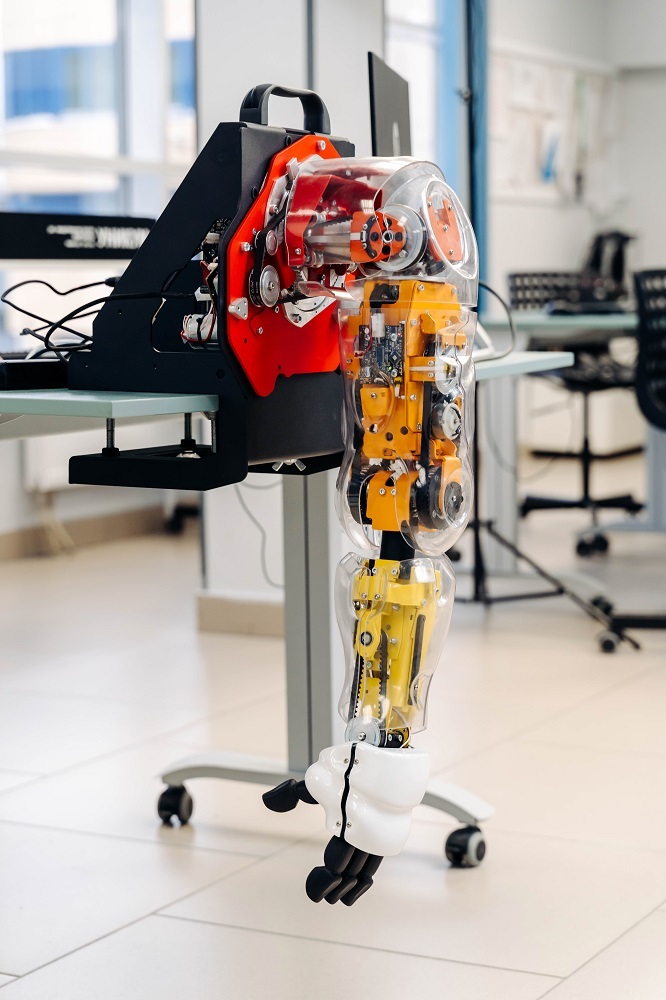
Комплект для изучения мехатроники и электроники на «реальной» руке робота.
Комплект для изучения робототехники Promobot Rooky помогает школьникам и студентам научиться основам работы с «реальными» сервисными роботами. Рука манипулятор Rooky – адаптированная для автономной работы копия руки сервисного робота Promobot.
Rooky помогает на практике изучать мехатронику и электронику, языки программирования и алгоритмику, сборку и техобслуживание робота.
С Promobot Rooky обучающиеся получают навыки сборки и управления рукой-манипулятором и сервоприводами, написания программного кода для решения задач прямой и обратной кинематики, умения работать с протоколами для организации связи между электронными устройствами и с промышленными шинами данных.
Занятия с Rooky легко встраиваются в любой учебный процесс школы, вуза, колледжа или учреждения дополнительного образования. В состав комплекта входит не только программно-аппаратная часть, но и учебно-методическая. Образовательные материалы уже используются в вузах России – СПбГЭТУ «ЛЭТИ», Новосибирском государственном университете, Пермском и Самарском политехах, МАИ, УрГУПС, РЭУ им. Плеханова и другие вузы.
Методические материалы созданы на основе практического опыта: в разработке участвовали ученые, инженеры и программисты, создающие роботов для использования в 43 странах мира. Материалы включают программу знаний педагогов, которая позволяет организовать комплексное изучение инновационной дисциплины.
Благодаря Promobot Rooky обучающиеся получают актуальные компетенции и навыки, необходимые для работы в робототехнической компании.
Hard skills:
- подключение Rooky к ПК;
- тестирование готового программного кода;
- запуск и настройка параметров работы серводвигателя;
- основные операции программирования: условные выражения, циклы, переменные, события,
- базовые алгоритмы и структуры данных;
- типы данных;
- исследование и оценка точности датчика касания;
- обработка показаний с датчика касания;
- основы устройства серводвигателей;
- обратная связь с серводвигателей и принцип работы энкодера;
- программирование автономного режима работы Rooky;
- программирование в среде Blockly и ЯП Python / С++ для работы Rooky.
Soft skills:
- поиск источников информации по темам, изучаемым на занятии;
- работа в команде;
- самообучение;
- креативное мышление;
- декомпозиция задачи;
- публичная защита докладов и отчётов по материалам занятий.
Комплектация
- Рука-манипулятор
- Блок питания и набор проводов Rooky
- Кронштейн крепления манипулятора
- Кнопка экстренной остановки
- Интерфейсный блок Robox
- Блок питания и набор проводов Robox
- Инструкция по эксплуатации
Характеристики
| Интерфейсный блок |
| Входное напряжение | ~220/110 В |
| Выходное напряжение | 12 В |
| Интерфейс | USB 2.0 |
| Интерфейс работы с устройствами | RS-485 |
| Рука-манипулятор |
| Входное напряжение | ~220 В |
| Напряжение питания моторов | 24 В |
| Максимальный ток | 15 А |
| Мощность | 350 Вт |
| Количество сервоприводов | 6 + 1 |
| Интерфейс | RS-485 |
| Вес | 10 кг |
| Рабочие углы суставов изделия Rooky |
| Надплечевой сустав | 160° |
| Плечевой сустав (подъем) | 83° |
| Плечевой сустав (вращение) | 173° |
| Локтевой сустав (подъем) | 80° |
| Локтевой сустав (вращение) | 172° |
| Запястье (подъем) | 52° |
| Пальцы (подъем) | 75° |