При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
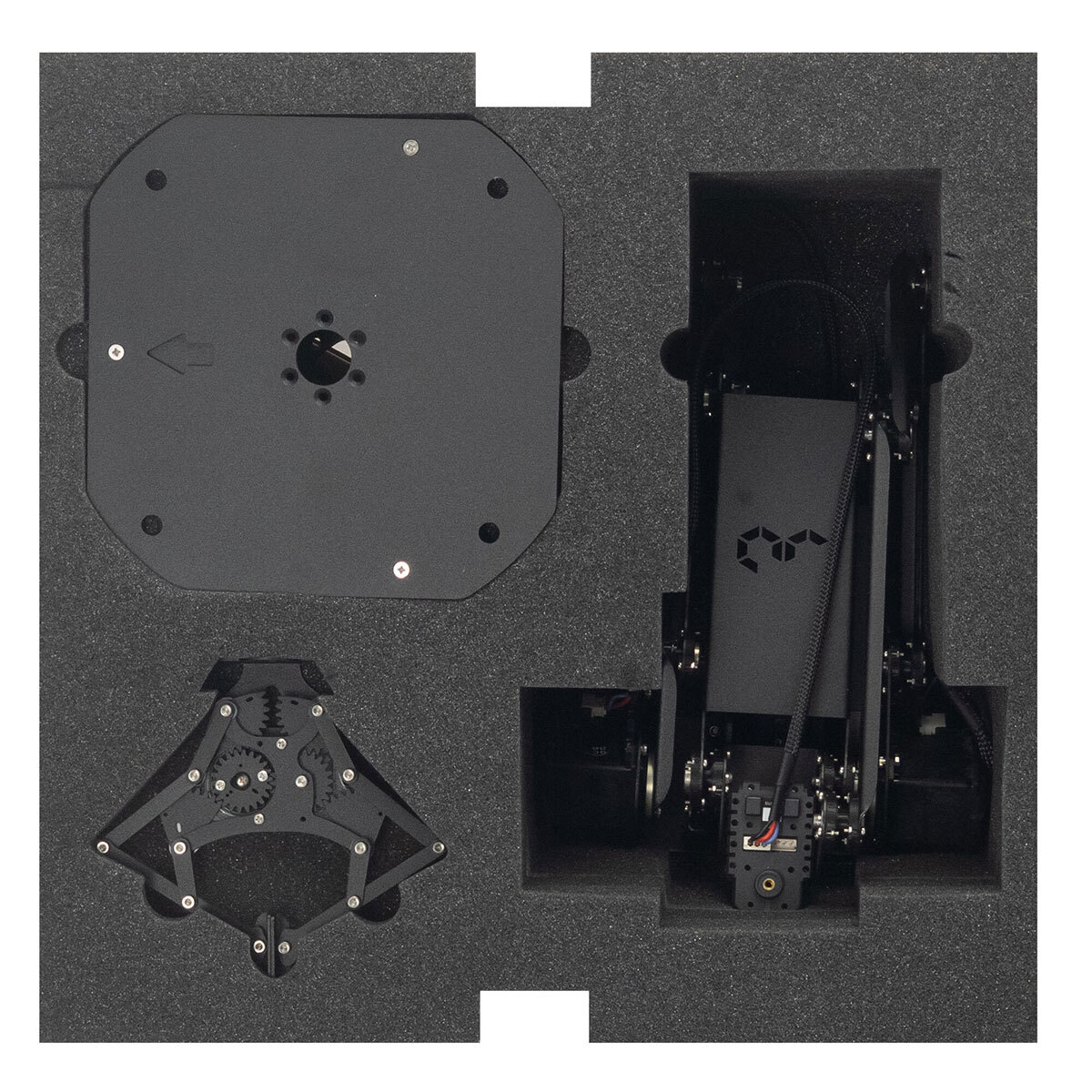
Учебно-лабораторный робототехнический комплекс на базе 3DOF манипуляционного РТК, управляемого с помощью клиент-серверного ПО, устанавливаемого на персональный компьютер учащегося.
Применение РТК в образовательном процессе позволяет познакомить учащихся с принципами проектирования и конструирования манипуляционных роботов, алгоритмами управления манипуляционными роботами, основам разработки управляющего ПО, а также базовым принципам построения архитектур систем управления гибких производственных ячеек.
Учебно-лабораторный манипуляционный РТК реализован на основе комплектующих, применяемых в профессиональных сферах робототехники и представляет собой блочно-модульный конструктор для разработки макетов гибких производственных линий. Благодаря этому, учащиеся могут на практике изучать основные принципы проектирования промышленных робототехнических комплексов и их систем управления, а также разрабатывать собственные проекты различных робототехнических систем промышленного назначения.
Технические особенности:
- Сбалансированные оси вращения с подшипниковыми узлами.
- Наличие крепежа для модуля технического зрения на схвате манипулятора.
- Манипуляционный РТК выполнен на базе продвинутой версии сервоприводов Dynamixel серии ХМ.
- Радиус зоны сервиса - не менее 30 см.
- Номинальная грузоподъемность – 250 грамм.
- Для управления РТК используется программируемый контроллер STEM Board c возможностью встраивания модулей расширения:
- Программируемый контроллер OpenCM – наличие,
- Встраиваемый одноплатный микрокомпьютер - наличие. - Наличие модуля технического зрения TrackingCam.
- Наличие сетевого адаптера для питания от сети 220В.
- Наличие интерфейсного кабеля для программирования.
- Поставляется в деревянном боксе для хранения и транспортировки.
В состав комплектов входит проектная документация с примерами проектирования и конструирования различных моделей промышленных роботов и библиотеки трехмерных моделей комплектующих для проектирования и прототипирования. Благодаря этому, учебно-лабораторные комплекты для разработки РТК могут применяться в задачах проектирования и конструирования робототехнических комплексов, а также при прототипировании макетов опытно-конструкторских и коммерческих проектов.
Программирование учебно-лабораторных манипуляционных РТК может осуществляться в блочно-модульной среде программирования для начинающих разработчиков, в эмуляторе промышленной среды программирования для специалистов в области промышленной автоматизации, среде LabView, а также в среде ROS и редакторе скриптов языка Python для разработчиков алгоритмов управления.
Данная линейка оборудования является основой для разработки макета автоматизированной "умной" фабрики в рамках подготовки к соревнованиям по регламентам WS.
Манипуляторы с плоско-параллельным типом кинематической схемы могут применяться для перемещения рабочего инструмента параллельно горизонтальной плоскости в цилиндрической системе координат относительно основания. Важным преимуществом данной кинематики является повышенная грузоподъемность на схвате за счет облегчения конструкции манипулятора ближе к схвату за счет расположения приводов в основании. В большинстве случаев подобные манипуляторы применяются для выполнения задач по перемещению грузов большой массы в машиностроении или логистике.
Учебный манипулятор представляет собой доступную учебную модель промышленного манипуляционного робота, обеспечивающую возможность на практике изучить большинство аспектов разработки систем управления манипуляционных роботов с угловым типом кинематики, а базовых принципов применения робототехники при автоматизации технологических процессов.