При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
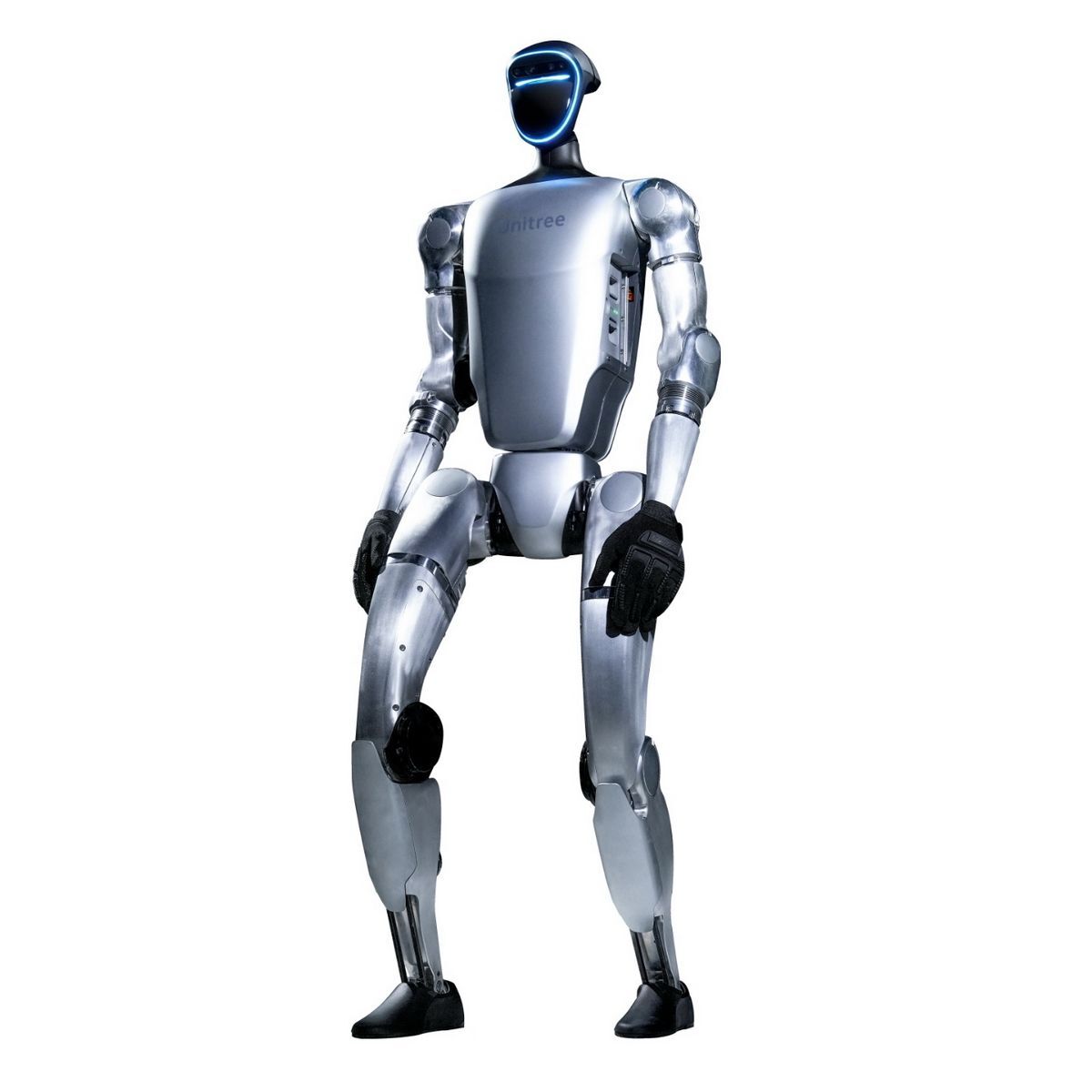
Программируемый ИИ-аватар
Робот-гуманоид G1 EDU оснащен ИИ-модулем и может быть использован для разработки пользовательских функций. Платформа обладает высокой подвижностью, имитирует движения человека и постоянно повышает их точность благодаря машинному обучению. G1 EDU подойдет для обучения программистов и привлечения внимания на мероприятиях.
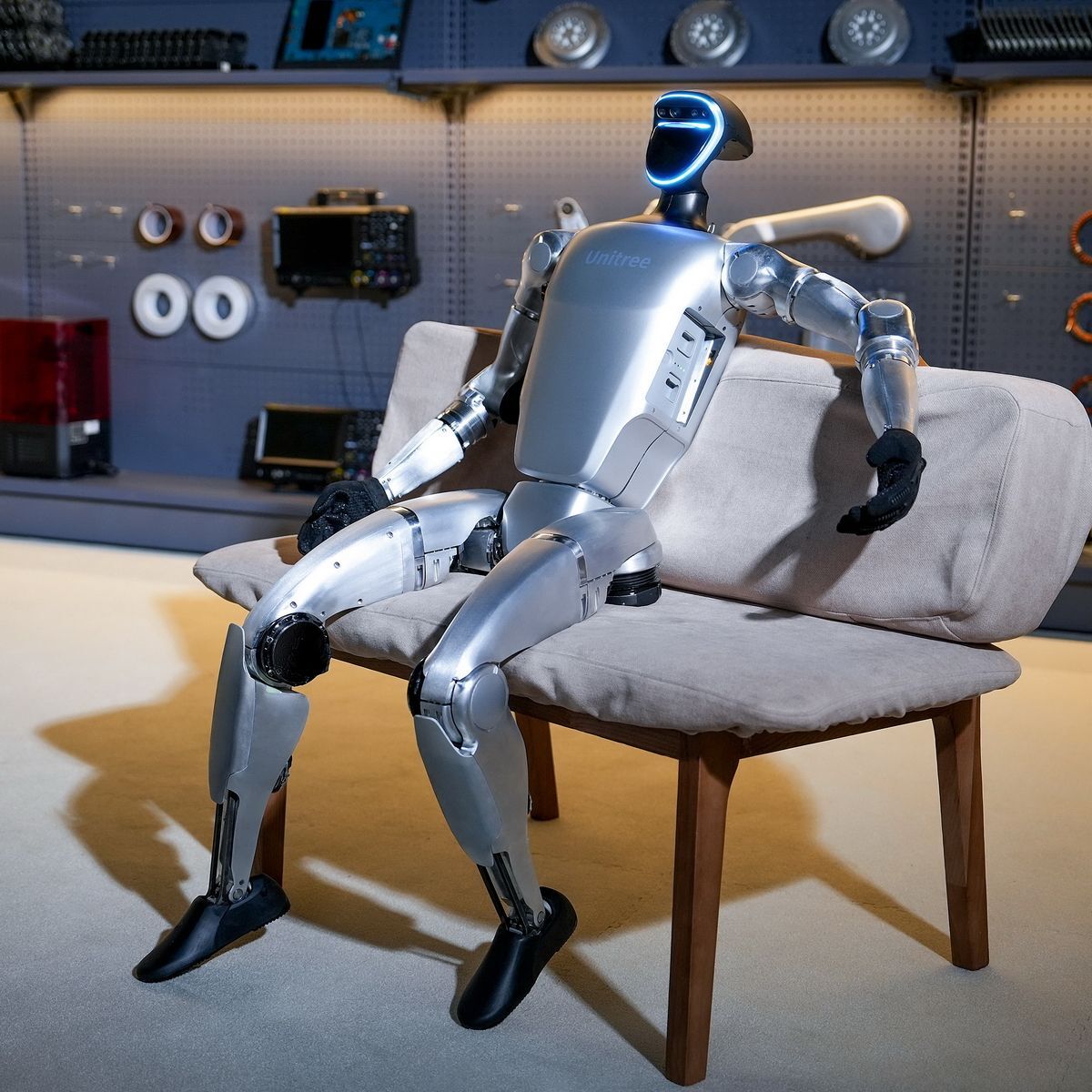
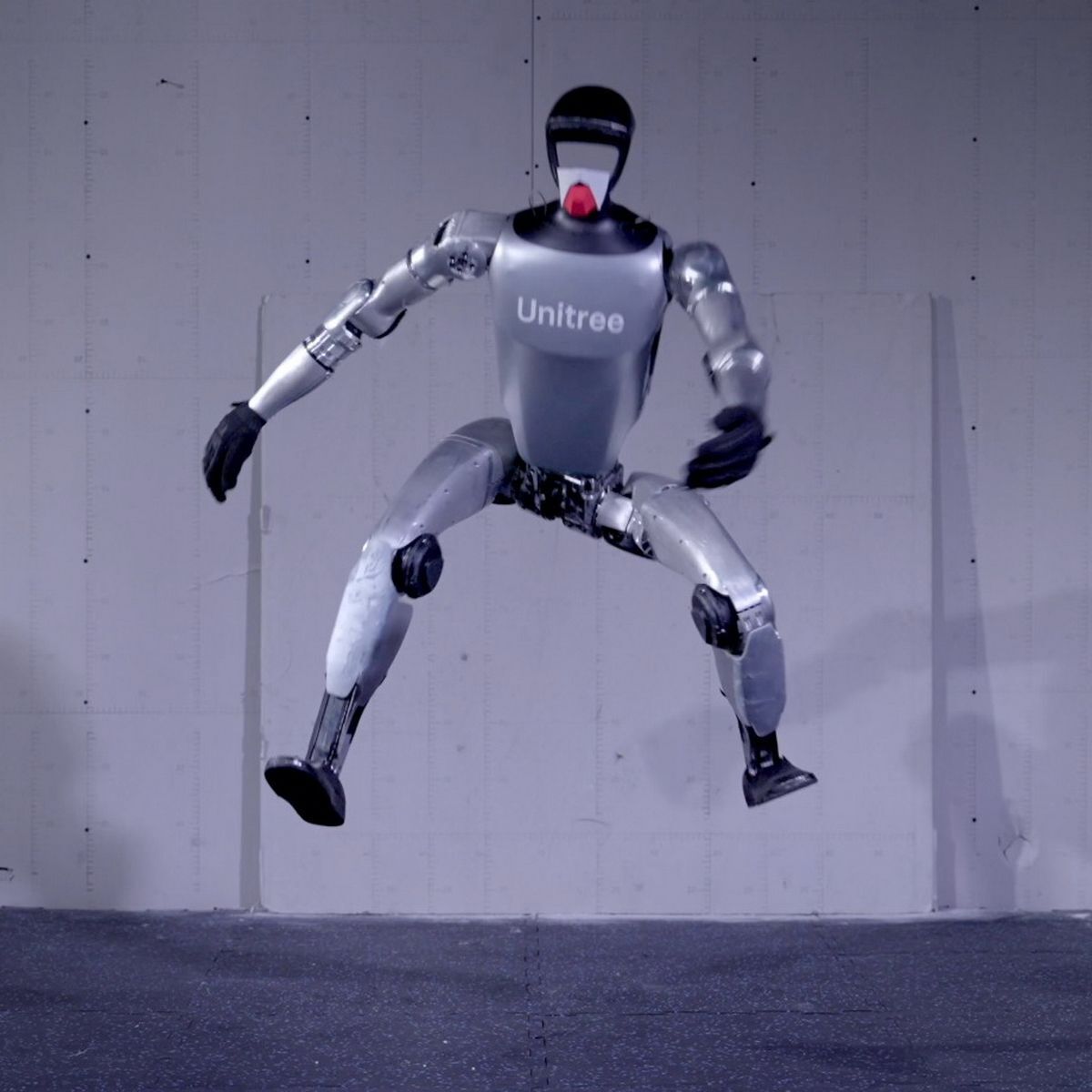
Запредельная гибкость
G1 EDU оснащен большим количеством электромоторов с широкой вариацией степеней свободы корпуса, рук и ног. Благодаря этому он особенно подвижен и обладает высокой гибкостью: крутится вокруг своей оси, прыгает, самостоятельно поднимается и складывается в компактную форму для удобной транспортировки.
Имитация человеческой кисти
Одной из ключевых особенностей G1 EDU является способность манипулировать объектами при помощи кистей. Робот-гуманоид оснащается пятипалыми или трехпалыми манипуляторами с регулируемыми параметрами силы и чувствительности. Благодаря этому он может взаимодействовать с различными предметами, выполняя сложные действия: аккуратное удерживание, перекладывание, открывание.
Заряжен на движение
Время работы платформы — до 2 часов. Емкий литиевый аккумулятор обеспечивает продолжительное время работы и при необходимости быстро заменяется, сокращая время простоя. С продвинутой системой питания G1 EDU готов к решению новых задач.
Технические характеристики
| Основные характеристики |
| Тип |
Гуманоидный робот |
| Назначение |
Программно-аппаратный комплекс для разработок |
| Процессоры |
8-ядерный. Опционально - NVIDIA Jetson Orin |
| Тип движителя |
Опоры |
| Количество движителей |
2 |
| Дополнительная поддержка |
Не требуется |
| Варианты передвижения |
Вперед, назад, вбок, повороты, прыжки, бег, поднятие после падения |
| Максимальная скорость |
2 м/сек |
| Количество степеней свободы |
23 |
| Особенности степеней свободы |
Степени свободы: "ноги" - 6 (каждая), "руки" - 5 (каждая), "торс" - 1 |
| Сканирование окружения |
| 3D камеры |
Камера глубины |
| Лазерные дальномеры |
3D Lidar |
| Взаимодействие с окружением |
| Беспроводные интерфейсы |
WiFi 6, Bluetooth 5.2 |
| Поддерживаемые частоты WiFi |
5 ГГц (5.15-5.35 / 5.65-5.85 ГГц), 2.4 ГГц (2.4-2.4835 ГГц) |
| Внимание |
Выходная мощность для беспроводных устройств, поставляемых в РФ, ограничена 20 dBm (100мВт) |
| Управление |
ручное (контроллер) |
| Прочие характеристики |
| Дополнительные функции |
Опция двух дополнительных моторов на торс |
| Установленное оборудование |
3D Lidar Livox-MID360, камера глубины Intel RealSense D435 |
| Установка доп.оборудования |
Возможность установки трехпалых манипуляторов |
| Требование к нагрузке |
Макс.нагрузка на руку - 3кг |
| Электропитание |
54VDC/5A |
| Емкость аккумулятора |
9000 |
| Время работы на одном заряде, мин |
120 |
| Материал корпуса |
Алюминий |
| Цвет |
Серебристый |
| Особенности |
Возможность разработки. Макс.крутящий момент в коленном суставе - 120N.m. Движение суставов: пояс - ±155град., колено - 0~165град., тазобедр.сустав. - P±154град., R-30~+170град., Y±158град.. Длина ноги - 0,6м, руки - 0,45м. Отсутствие внешних кабелей. |
| Вид поставки |
RTL |
| Ширина, мм |
450 |
| Высота, мм |
1270 |
| Глубина, мм |
200 |
| Вес, кг |
37 |
| Комплект поставки |
Робот, документация, зарядное устройство, аккумулятор, комплект внешних кабелей (2шт), кабель USB-C (1шт), сенсоры мощности для опор (4шт), рама для настройки и калибровки (1шт) |