При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
Высокая скорость
Scout Mini приспособлен к быстрому перемещению по неровной поверхности. Развивает максимальную скорость до 11 км/ч и перевозит до 10 кг груза. Оснащается модулями полезной нагрузки.
Компактное шасси
Облегченный и малогабаритный корпус упрощает транспортировку устройства. Чтобы начать работу, роботу требуется минимум места.
Сверхманевренность
Помимо стандартных колес, робота можно оснастить роликонесущими колесами. В такой конфигурации Scout Mini двигается боком и переносит больше груза ― до 20 кг.
Точный контроль
Scout Mini подходит для работы в тесных пространствах ― независимая подвеска и нулевой радиус разворота гарантируют устойчивость при передвижении и дополнительный контроль. Вместе с грузом преодолевает небольшие препятствия и заезжает на склоны с углом 30°.
Отзывчивое управление
Системы Scout Mini адаптированы под вторичную разработку. Коммуникация с роботом происходит с помощью стандартного интерфейса CAN. Прилагаются SDK с открытым исходным кодом и пакеты ROS.
Технические характеристики
| Основные характеристики |
| Предупреждение |
Габариты и вес платформы указаны без оборудования |
| Тип |
Колесный робот |
| Назначение |
Набор для разработки. Совместим с роботами-платформами AgileX Scout Mini, Scout 2.0, Tracer и Bunker (в комплекте - шасси Scout Mini). Предназначен для использования внутри помещений. |
| Процессоры |
NVIDIA Jetson Nano - ARM A57 1.43GHz CPU, 128 Maxwell GPU |
| Память |
4GB LPDDR4 25.6GB/s |
| Тип движителя |
Колеса |
| Количество движителей |
4 |
| Дополнительная поддержка |
Нет |
| Характеристики подвески |
Полный привод. Колесная база — 452мм. Диаметр колеса— 160мм. Миним.клиренс — 115мм |
| Количество двигателей |
4 |
| Варианты передвижения |
Вперед, назад, повороты в движении, развороты на месте |
| Максимальная скорость |
2,7м/с |
| Преодоление препятствий, см |
7 |
| Макс.наклон поверхности, град. |
30 |
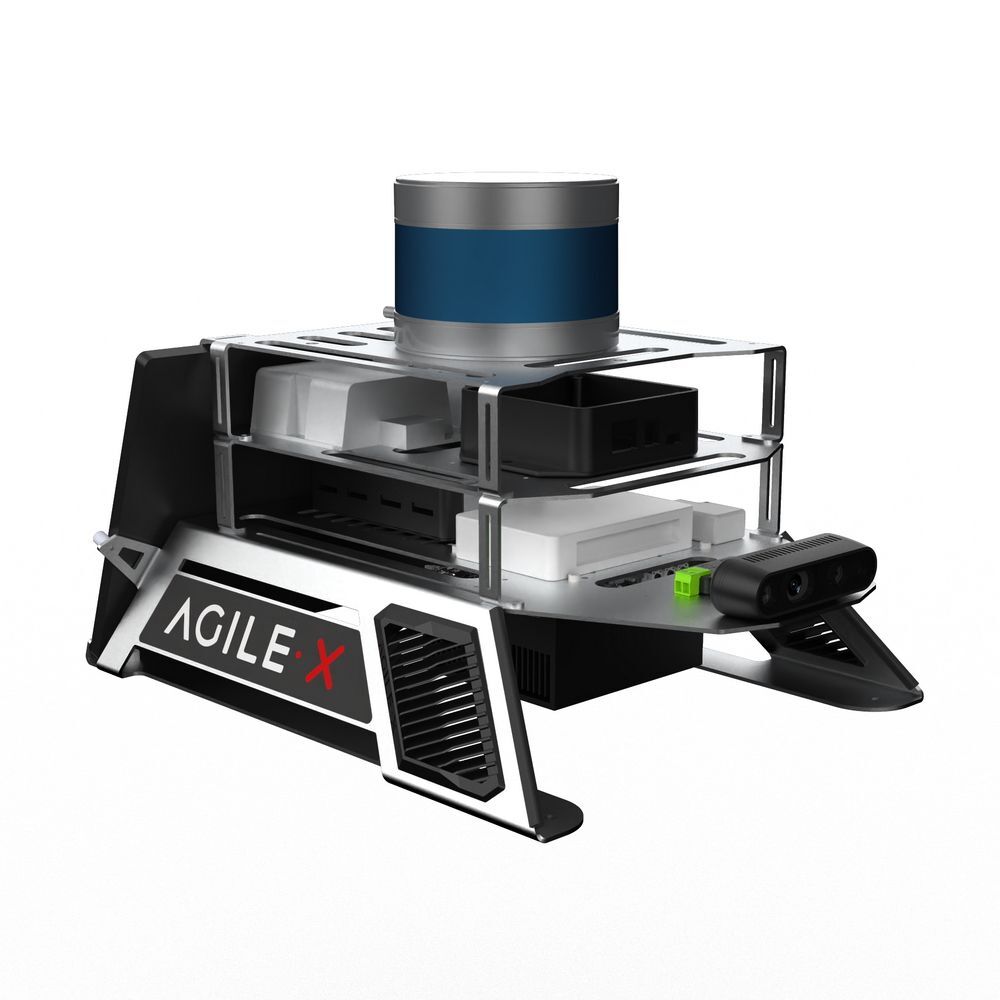
| Сканирование окружения |
| 3D камеры |
Intel Realsense D435 |
| Лазерные дальномеры |
LIDAR VLP-16 |
| Параметры сканирования |
LIDAR: Горизонтальное сканирование 360 градусов с угловым разрешением 0,1~0,4 градуса, вертикальное сканирование +/-15 градусов с угловым разрешением 2 градуса, частота сканирования от 5 до 20 Гц, дистанция от 0.1 до 100м, пылевлагозащита по классу IP67. 3D-камера: разрешение 1280x720, угол обзора 87x58 градусов, частота кадров до 90fps, дистанция от 0.3 до 3.0м. |
| Взаимодействие с окружением |
| Дисплеи |
11.6" – разрешение 1920x1080p, интерфейс USB Type-C, толщина 8мм, вес 480гр |
| Проводные интерфейсы |
RS232, CAN |
| Прочие характеристики |
| Установленное оборудование |
Маршрутизатор Communication GL.iNet GL-AR750S — CPU QCA9563 775MHz, DDR2 128MB, Dual Flash 16MB NOR + 128MB, 802.11ac, 300Mbps (2.4GHz) + 433Mbps (5GHz), 1x WAN, 2x LAN, USB2.0, DC-in 5V/2A , TF-Card Slot, антенны 2x2dBi, 103x68x24мм, вес 110гр |
| Установка доп.оборудования |
На Т-образные рельсы (ширина между рельсами - 230мм) |
| Допустимая нагрузка, кг |
10 |
| Емкость аккумулятора |
15Ah |
| Время зарядки, мин |
120 |
| Максим. запас хода на одном заряде, км |
10 |
| Требования к окружающей среде, температура |
-10...+45C |
| Защита от внешнего воздействия |
IP22 |
| Языки программирования |
Open-source SDK |
| Материал корпуса |
Алюминий, сталь, пластик |
| Цвет |
Серебристый, черный |
| Особенности |
Li-Ion аккумулятор 24VDC |
| Вид поставки |
RTL |
| Ширина, мм |
580 |
| Высота, мм |
245 |
| Глубина, мм |
612 |
| Вес, кг |
23 |
| Комплект поставки |
Робот, документация, зарядное устройство, аккумулятор |