При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
Набор деталей для сбоки робота с инфракрасным датчиком препятствий."Глазами" робота в этом конструкторе является ультразвуковой датчик. "Мозгом" робота - контроллер Ардуино.
Механическая часть
Механическая часть робота-конструктора построена на базе 4-х моторного шасси и включает в себя несущую пластину длиной 170 мм и шириной 120 мм. 4 электромотора с редуктором и пластмассовыми колесами. На колеса одеты полиуретановые шины. Так же в комплект входит сервопривод.
Электронная часть
Электронная часть состоит из драйвера электромоторов, Ультразвукового приемо - передатчика иконтроллера Arduino UNO R3. Конструктор может комплектоваться аналогичными и совместимыми с Arduino UNO R3 контроллерами.
Сборка конструктора
Для установки драйвера электромоторов, контроллера, сервопривода на несущей пластине предусмотрены отверстия. На контактах разъема POWER и разъема ICSP можно найти контакты для подключения питания УЗ датчика и сервомотора.
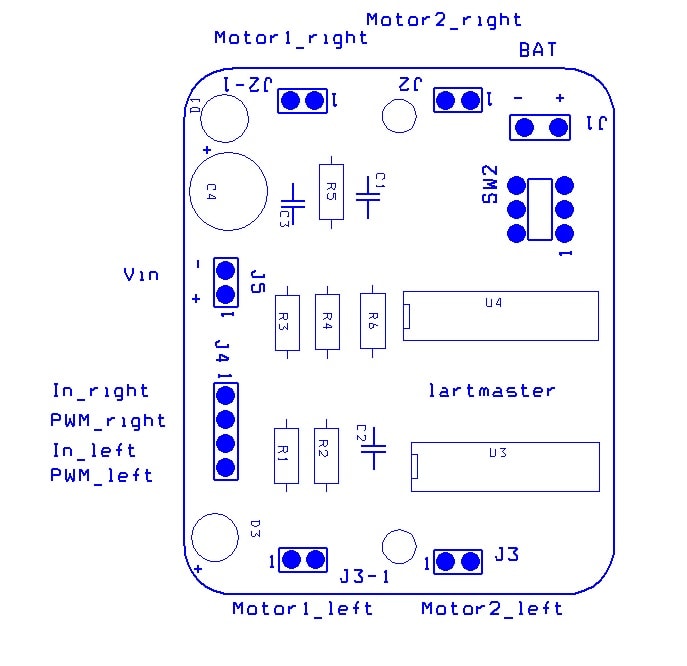
Подключение драйвера электромотора
BAT – клемма для подключения батареи питания. Напряжение питания Драйвера 3-9В;
Vin – параллельный BAT разъем. Предназначен для подключения питания батареи
на другие электронные модули.
Motor1-right – разъем для подключения переднего правого электромотора
Motor2-right - разъем для подключения заднего правого электромотора
Motor1-left - разъем для подключения переднего левого электромотора
Motor2-left - разъем для подключения заднего левого электромотора
In right – управление направлением вращения правых электромоторов
PWM-right – управление скоростью вращения правых электромоторов
In left – управление направлением вращения левых электромоторов
PWM-left – управление скоростью вращения левых электромоторов
 Ультразвуковой датчик
Ультразвуковой датчик
В качестве сенсора для определения препятствий используется Ультразвуковой датчик. УЗ датчик позволяет не только обнаруживать препятствие, но и с точностью до 3-х мм определить расстояние по помехи. УЗ датчик устанавливается на поворотное устройство (сервомотор). Что дает возможность находить свободный путь для продолжения движения с широким углом обзора. Задача программиста заключается в разработке алгоритма управления двигателями робота на основе информации, получаемой от УЗ датчика.
Ультразвуковой Модуль HC-SR04

Модуль предназначен для определения расстояния до объекта бесконтактным способом. Эффективное расстояние составляет 2cm-400cm, Точность измерения расстояния в диапазоне от 2-х см до 400 см составляет 3 мм.
Эффективный угол +-15 градусов.
Рабочее напряжение: 5V (DC)
Максимальный ток: Не более 2mA.
Модуль состоит из ультразвукового передатчика, приемника и схемы управления.
Принцип работы:
Для запуска датчика необходимо на вход trig подать с контроллера импульс длительностью 10 микросекунд. Этот импульс запускает ультразвуковой генератор, который излучает 8 посылок, частотой 40 кГц. Отраженный от объекта сигнал принимается приемником и преобразуется в электрический сигнал ТТЛ уровня, который появляется на контакте echo. Длительность этого сигнала пропорциональна расстоянию до объекта. Расстояние до объекта рассчитывается по формуле: S(sm)=Techo/58. (Расстояние до объекта равно частному от деления длительности импульса Эхо в микросекундах на делитель 58).
Комплектация
- Несущая пластина – 1 шт.
- Мотор-редуктор – 4 шт.
- Колесо пластиковое – 4 шт.
- Батарейный отсек на 6 шт. батареек АА – 1 шт.
- Драйвер электромотора – 1 шт.
- Контроллер совместимый с Arduino UNO R3 – 1 шт.
- Модуль Ультразвукового датчика HC-SR04 – 1 шт.
- Держатель пластиковый для датчика – 1 шт.
- USB кабель – 6 шт.
- Винт М3 х 25 мм – 8 шт.
- Винт М3 х 6 мм – 12 шт.
- ВинтМ2 х 10 мм – 2 шт.
- Гайка М2 – 2 шт.
- Комплект проводов – 1 шт.
