При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
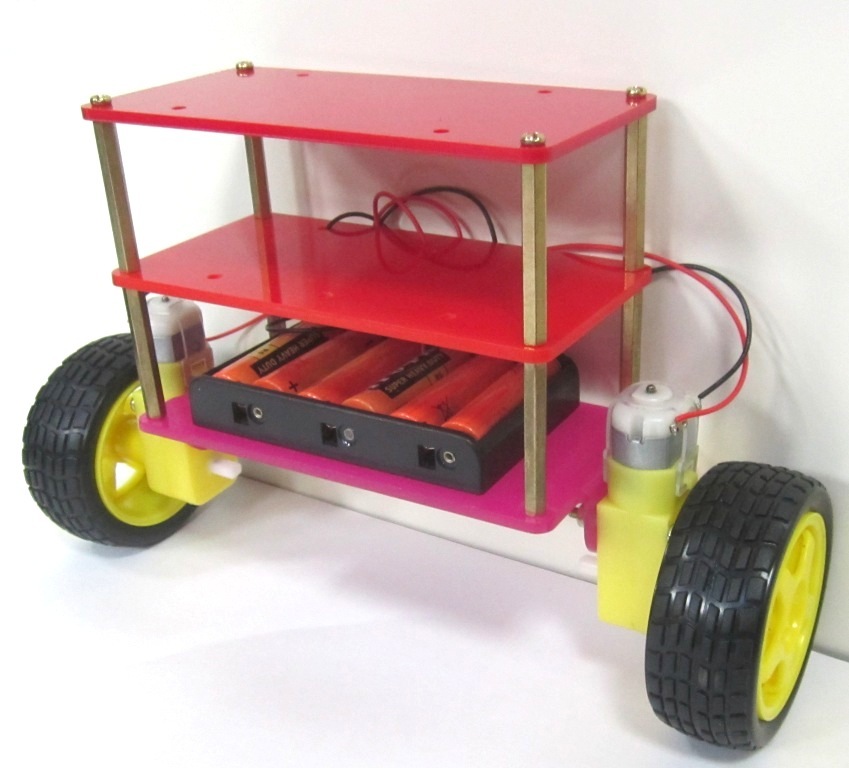
Конструктор позволяет собрать балансирующего робота. В состав конструктора входят набор деталей шасси, ходовой части, контроллера ARDUINO, драйвер моторов и 2 электромотора с редуктором.
В состав конструктора входят 2 электромотора с редуктором, на выходной вал, которого устанавливаются колеса диаметром 65 мм. Количество оборотов на выходном валу редуктора при напряжении питания 6 Вольт, составляет примерно 120 оборотов в минуту. Такая скорость вращения дает возможность создавать достаточно подвижных роботов.
Колеса обуты в полиуретановые шины, что обеспечивает очень качественное сцепление с поверхностью.
Традиционная тележка, применяемая в различных средствах транспорта, имеет четыре колеса и центр тяжести такой тележки для повышения устойчивости располагается как можно ближе к поверхности, по которой движется эта тележка. Четыре и даже 3 колеса дают тележке полную устойчивость практически на любой поверхности. Двухколесные тележки с размещением колес, как вдоль оси движения, так и при перпендикулярном размещении колес по отношению к направлению движения, требуют определенных усилий для поддержания равновесия. Модель двухколесного балансирующего робота нагляднее рассматривать как модель перевернутого маятника, который имеет центр тяжести выше своей точки опоры и закреплён на конце жёсткого стержня. Для того, что бы у нас была возможность удерживать вертикальное положение маятника, точка опоры должна быть подвижна относительно поверхности. Для этого точку опоры обычно закрепляют на тележке, которая может перемещаться. Удержание вертикального положения осуществляется с помощью перемещения точки опоры по горизонтали. Для реализации балансирующего робота необходимы: корпус тележки с колесами, гироскоп, акселерометр, элементы питания и микроконтроллер, который будет управлять устройством.
Перед сборкой и программированием обратите внимание на следующие технологические детали: чем выше центр тяжести тележки, тем проще стабилизировать систему. Поэтому самые тяжелые компоненты, а это батарейный отсек и плата управления, необходимо поместить в верхнюю часть. Гироскоп и акселерометр должны быть жестко закреплены. Так чтобы достаточно точно отслеживать положение тележки, скорость падения. Для этого необходимо припаять модуль MPU6050 к плате управления.
Характеристики шасси:
- Платформа выполнена из ударопрочного акрилового стекла
- Длина 170 мм
- Ширина 120 мм
Мотор-редуктор:
- Передаточное число редуктора: 1:48.
- Скорость вращения выходного вала редуктора: 120 об/мин (при напряжении питания 6V)
- Напряжение питания моторов: 3 ~ 6V
Колеса:
- Диаметр колеса 65 мм
- Ширина протектора 25 мм
Изменение направления движения осуществляется по танковой схеме. Т.е. реверсом левой или правой пары колес.
Комплектация конструктора
| Пластина акриловая TOP |
1 шт |
| Пластина акриловая MIDLE |
1 шт |
| Пластина акриловая MOTOR |
1 шт |
| Стойка металлическая М-П 40 мм |
4 шт |
| Стойка металлическая М-М 40 мм |
4 шт |
| Стойка металлическая 10 мм |
4 шт |
| Винт М3 х 25 мм |
4 шт |
| Винт М3 х 8 мм |
6 шт |
| Винт М3 х 6 мм |
18 шт |
| Гайка М3 |
12 шт |
| Блок управления R-5B |
1 шт |
| Контроллер Arduino Nano |
1 шт |
| Модуль Гироскоп-акселерометр |
1 шт |
| Кабель USB |
1 шт |
| Электромотор с редуктором ТТ-130 (1:48, 250 rpm) |
2 шт |
| Пластиковое колесо 65 мм |
2 шт |
| Уголок крепления мотора |
2 шт |