При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
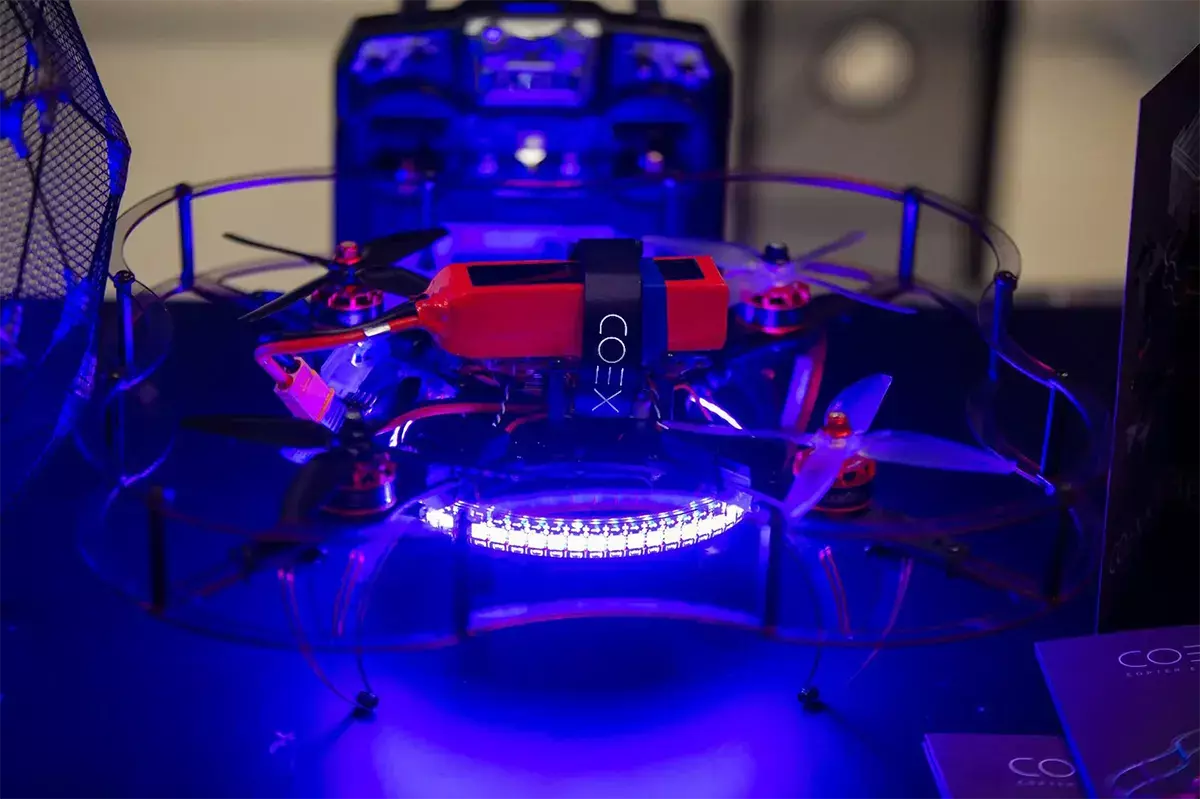
Образовательный набор квадрокоптера с открытым исходным кодом для обучения эксплуатации беспилотных авиационных систем.
Данный конструктор был разработан для учеников старших классов и студентов университетов, а также для всех, кто занимается исследовательскими проектами, участвует в соревнованиях, олимпиадах и хакатонах.
Учебный набор «Гаскар» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
Комплексное решение для обучения летающей робототехнике
Простой в сборке конструктор квадрокоптера, контроллер полета с открытым исходным кодом, Raspberry Pi 4 на борту, методические программы и учебные материалы, мировое сообщество, локальные и международные соревнования - это все, что вам нужно для увлекательных занятий
по летающей робототехнике!
Не упустите возможность развить новые навыки:
- Моделирование – создание 3D-моделей дронов и полезных нагрузок.
- Сборка – развитие мелкой моторики, работа с электроникой.
- Пилотирование – управление дроном с помощью пульта дистанционного управления и камеры.
- Программирование –Scratch, Python и С++ кодирование с использованием системы Linux.

Преимущества квадрокоптера
- Навигация в помещении
Алгоритм оптического потока, работающий на Raspberry Pi 4, помогает дрону сохранять свое положение в помещении
- Ударостойкая рама
Карбоновая рама стала противоударной, приобрела повышенную прочность, ее можно быстро собрать и отремонтировать
- Мощные моторы
Бесколлекторные моторы с высокой эффективностью положительно влияют на стабилизацию управления полетом и полезную нагрузку
- Программируамая LED-лента
Программируемая лента 144 диод/м позволяет квадрокоптеру Клевер оставаться заметным в воздухе
- PX4 прошивка
Самый популярный пакет программного обеспечения с открытым исходным кодом для квадрокоптеров и других типов беспилотных летательных аппаратов
- ROS Платформа
Платформа Clover включает образ Raspberry Pi с предустановленной средой для разработки автономных рейсов
- Распознавание ArUco маркеров
Популярная технология позиционирования роботизированных систем с использованием компьютерного зрения
- Optical flow
Выполняйте полеты в помещении без маркеров ArUco или повышайте стабильность с ним
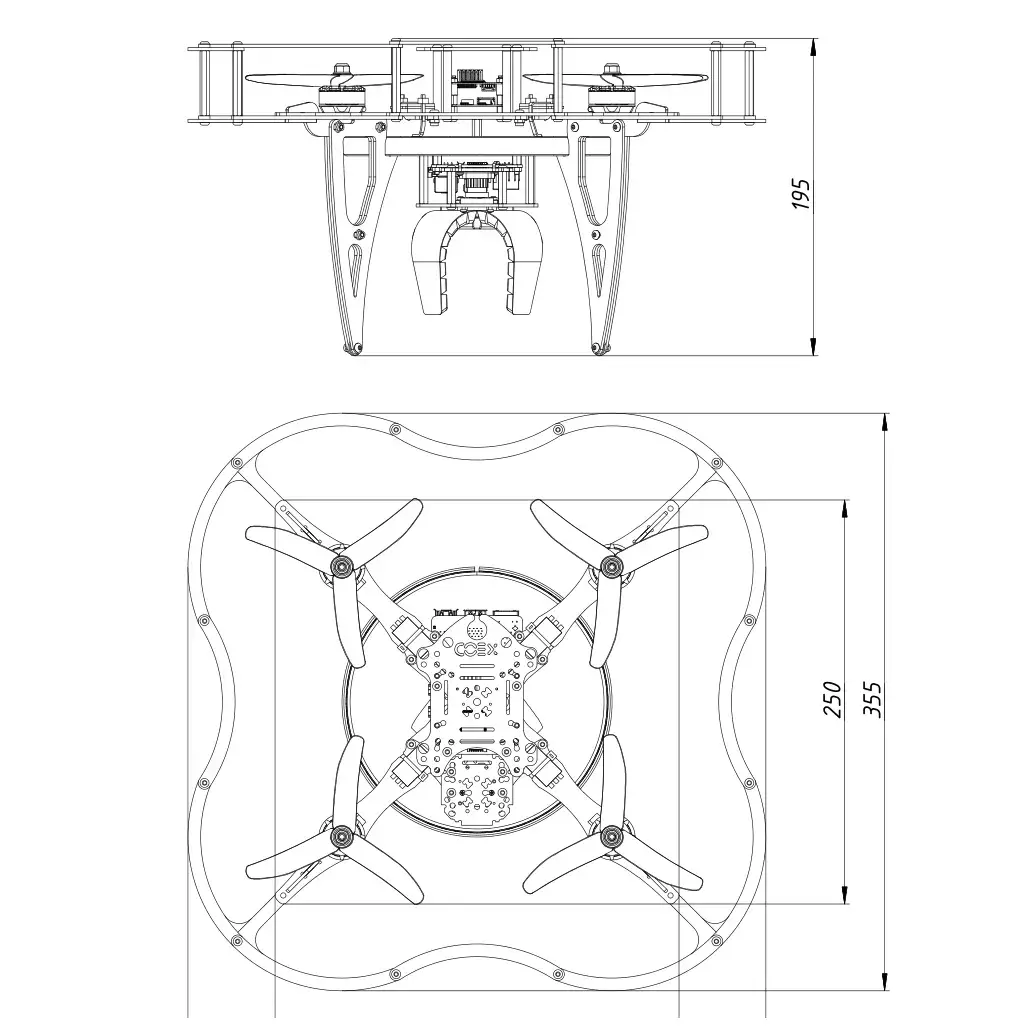
Технические характеристики квадрокоптера
- Размер: 355x355x125 мм
- Расстояние между моторам по диагонали: 234 мм
- Диаметр пропеллеров: 5 дюймов
- Максимальный взлетный вес: 1 кг
- Максимальная скорость: 72 км/ч
- Максимальное время полета: 15 мин
- Диапазон рабочих температур: от 0°С до +40°С
- Максимальная высота полета: 500 м
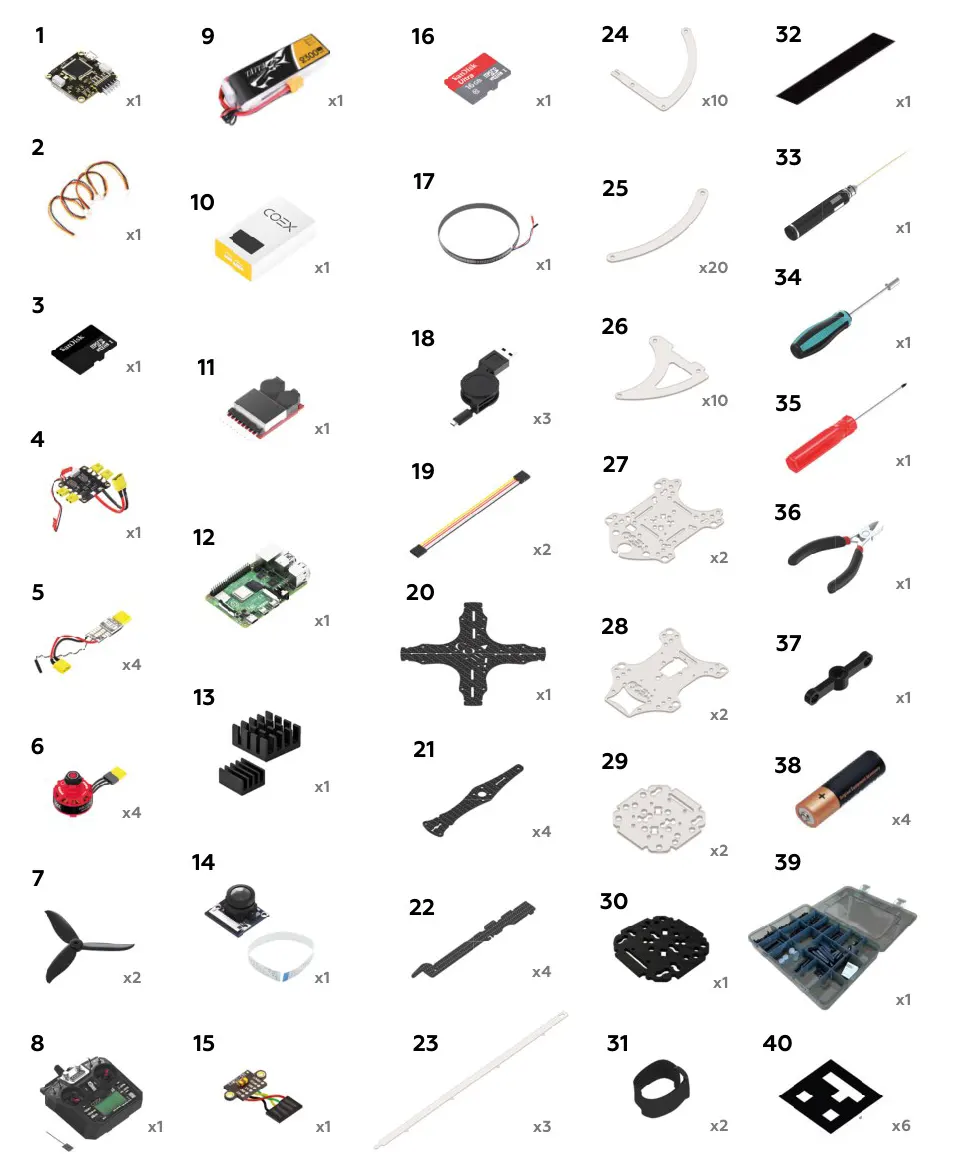
Состав набора
- Полетный контроллер COEX Pix
- Провода для подключения полетного контроллера
- Модуль памяти micro SD 1 Gb для полетного контроллера
- Плата распределения питания COEX PDB
- Регулятор оборотов, COEX ESC 25A - 4 шт
- Бесколлекторный электродвигатель, COEX BR2306, 2400 kV - 4 шт
- Пропеллер пластиковый 5046x3 (комплект) - 2 шт
- Комплект аппаратуры Flysky i6x (10 каналов) с приемником и кабелем для симулятора
- Литиевая аккумуляторная батарея, Tattu 3S LiPo 2300 mAh 45С
- Зарядное устройство COEX E4
- Индикатор уровня заряда батареи
- Одноплатный микрокомпьютер Raspberry Pi 4 Model B 1Gb
- Комплект радиаторов Raspberry Pi 4
- Камера для одноплатного компьютера, Raspberry Pi 4 Camera (G)
- Лазерный дальномер CJMCU-531
- Модуль памяти micro SD 16 Gb для одноплатного микрокомпьютера
- Светодиодная лента адресная, 144 led/m 5V IP65, 50 см
- Кабели USB - 3 шт
- Соединительный кабель для телеметрии и полетных контроллеров 15см (3pin) - 2 шт
- Дека центральная, карбон
- Луч, карбон - 4 шт
- Пластина жёсткости, карбон - 4 шт
- Пластина для LED - 3 шт
- Дуга монтажная - 10 шт
- Дуга - 20 шт
- Ножка-накладка (малая) - 10 шт
- Дека монтажная - 2 шт
- Дека захвата - 2 шт
- Дека монтажная (малая) - 2 шт
- Дека монтажная (малая), карбон
- Ремешок для батареи, 200 мм - 2 шт
- Велкро-липучка 2,5x10 см на клеящей основе
- Отвертка под шестигранник 2 мм
- Отвертка торцевая 5.5 мм (под м3)
- Отвертка PH1
- Бокорезы
- Ключ для пропеллеров
- Батарейка АА для радиоаппаратуры - 4 шт
- Контейнер с крепежом
- ArUco маркер - 6 шт