
Получите бесплатную консультацию
Глупых вопросов не бывает. Мы ответим на все за 5 минут! Проверьте!
Каталог
Информация

Комплексные поставки оборудования
для современного образования с 2013 года

Электромотор – устройство для преобразования электрической энергии в механическую. То есть, устройство на которое надо подать электрический ток, а в замен получить вращение вала мотора.
Типичный мотор постоянного тока изображён ниже.

Разберёмся как устроен мотор постоянного тока на примере простейшей модели.
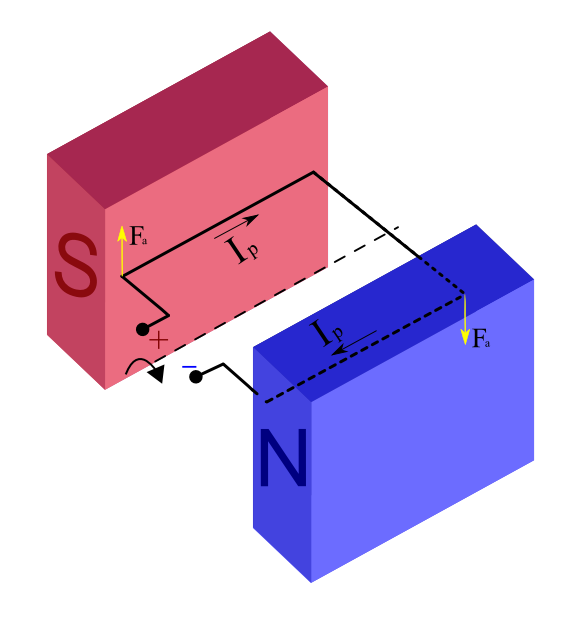
У нас есть магнитное поле, генерируемое полюсами магнита и металлическая рамка. На клеммы «+» и «-» подаётся питающее напряжение (Up) мотора и по рамке начинает проходить постоянный электрический ток (Ip). На любой проводник, по которому проходит электрический ток, действует, так называемая, сила Ампера (Fa), направление которой зависит от направления тока вдоль проводника. Так как ток проходит от плюса к минусу, получается, что на одной стороне рамки ток направлен слева-направо, а на другой справа-налево. Поэтому сила Ампера на противоположных сторонах рамки направлена в разные стороны. Рамка начинает вращаться. Если подать питающее напряжение наоборот – направление тока изменится и рамка начнет вращение в противоположную сторону.
Для большей наглядности, можно посмотреть видео.
Рассмотрим основные характеристики мотора на конкретном примере.
Рабочее напряжение – диапазон допустимых питающих напряжений. Чем питающее напряжение будет больше, тем больше будет мощность мотора и скорость вращения. Однако, бесконечно повышать напряжение нельзя, так как с каждым новым вольтом, повышается риск того, что мотор перегорит.
Для наглядности, проведем эксперимент: будем постепенно повышать питающее напряжение мотора, при этом будем контролировать потребляемый ток мультиметром.
Первое, что бросается в глаза – при повышении напряжения от 3 до 9 В, ток изменяется от 40 до 60 мА. Получается, что при увеличении напряжения в 3 раза, ток потребления увеличился всего 2 раза.
Теперь вспомним закон Ома:

Отсюда видно, что, при постоянном сопротивлении провода, ток в цепи должен увеличиваться во столько же раз, во сколько увеличивается напряжение. То есть, обмотка мотора (проволочная рамка) должна иметь переменное сопротивление.
Разберемся с этим парадоксом. Нашу проволочную рамку постоянно пронизывает магнитное поле. Если рамка начинает вращаться, то под действием магнитных сил, в ней возникает напряжение, направленное на противодействие внешних сил, то есть, против внешнего напряжения, которое мы подаем на мотор. Потому, в данном случае, закон Ома надо рассматривать вот так:
 ,
,
где E – обратная электродвижущая сила (наведённое магнитным полем напряжение).
Чем быстрее вращается мотор, тем больше значение обратной электродвижущей силы, тем меньше будет потребляемый мотором ток. Поэтому, на холостом ходу мотор всегда потребляет меньший ток, чем под нагрузкой.
Номинальное напряжение – наиболее подходящее напряжение, для питания мотора, при котором мотор способен быстро вращаться, при этом не перегреваясь.
Ток без нагрузки – ток, потребляемый мотором на холостом ходу. Поскольку, на холостом ходу мотор вращается с максимальной скоростью, то потребляемый ток в таком режиме работы будет минимальным для конкретной модели мотора.
Ток при блокировке – ток, потребляемый мотором, при блокировке вала мотора. Данная величина тока потребления будет максимальной. Так как, блокировка вала означает – отсутствие вращения, поэтому будет полностью отсутствовать обратная электродвижущая сила. На практике данную величину можно измерить косвенно, не блокируя вал мотора. Для этого достаточно воспользоваться законом Ома:

U – напряжение питания. Его значение нам известно. R – сопротивление обмотки мотора. Данное значение можно измерить мультиметром, подключив его к клеммам мотора, как к обычному резистору.
Например, для нашего мотора измерим сопротивление обмотки R = 9.9 Ом. При напряжении питания 6 В, получаем:

Диаметр выходного вала – диаметр подвижной оси мотора, которая совершает вращение.
Передача – полная аналогия с автомобилем. Внутри мотора установлена группа шестеренок, благодаря которым, можно, в известном соотношении, снизить скорость вращения вала мотора, но, при этом, увеличить его выходную мощность.
Скорость без нагрузки – скорость вращения вала мотора (количество оборотов в минуту) на холостом ходу.
Крутящий момент или момент силы – векторная физическая величина, характеризующая вращательное действие силы на твёрдое тело.
В нашем случае данная величина является произведением двух параметров: расстояние от оси мотора до точки прикрепления груза (см) и усилие (кг). Если вы собираете, например, дрель, то данная величина должна вас беспокоить не сильно. Однако, если если вы хотите прикрепить к вашему мотору втулку на вал, то надо помнить, что при увеличении диаметра втулки, уменьшается максимальное усилие, которое может обеспечить мотор.
Материал с сайта amperka.ru
